Containers on LUMI-C and LUMI-G¶
What are we talking about in this chapter?¶
Let's now switch to using containers on LUMI. This section is about using containers on the login nodes and compute nodes. Some of you may have heard that there were plans to also have an OpenShift Kubernetes container cloud platform for running microservices but at this point it is not clear if and when this will materialize due to a lack of personpower to get this running and then to support this.
In this section, we will
-
discuss what to expect from containers on LUMI: what can they do and what can't they do,
-
discuss how to get a container on LUMI,
-
discuss how to run a container on LUMI,
-
discuss some enhancements we made to the LUMI environment that are based on containers or help you use containers,
-
and pay some attention to the use of some of our pre-built AI containers.
If you are interested in doing AI on LUMI, we highly recommend that you have a look at our AI course materials.
Remember though that the compute nodes of LUMI are an HPC infrastructure and not a container cloud!
What do containers not provide¶
What is being discussed in this subsection may be a bit surprising. Containers are often marketed as a way to provide reproducible science and as an easy way to transfer software from one machine to another machine. However, containers are neither of those and this becomes very clear when using containers build on your typical Mellanox/NVIDIA InfiniBand based clusters with Intel processors and NVIDIA GPUs on LUMI. This is only true if you transport software between sufficiently similar machines (which is why they do work very well in, e.g., the management nodes of a cluster, or a server farm).
First, computational results are almost never 100% reproducible because of the very nature of how computers work. If you use any floating point computation, you can only expect reproducibility of sequential codes between equal hardware. As soon as you change the CPU type, some floating point computations may produce slightly different results, and as soon as you go parallel this may even be the case between two runs on exactly the same hardware and with exactly the same software. Besides, by the very nature of floating point computations, you know that the results are wrong if you really want to work with real numbers. What matters is understanding how wrong the results are and reproduce results that fall within expected error margins for the computation. This is no different from reproducing a lab experiment where, e.g., each measurement instrument introduces errors. The only thing that containers do reproduce very well, is your software stack. But not without problems:
Containers are certainly not performance portable unless they have been designed to run optimally on a range of hardware and your hardware falls into that range. E.g., without proper support for the interconnect it may still run but in a much slower mode. But one should also realise that speed gains in the x86 family over the years come to a large extent from adding new instructions to the CPU set, and that two processors with the same instructions set extensions may still benefit from different optimisations by the compilers. Not using the proper instruction set extensions can have a lot of influence. At my local site we've seen GROMACS doubling its speed by choosing proper options, and the difference can even be bigger.
Many HPC sites try to build software as much as possible from sources to exploit the available hardware as much as possible. You may not care much about 10% or 20% performance difference on your PC, but 20% on a 160 million EURO investment represents 32 million EURO and a lot of science can be done for that money...
But even full portability is a myth, even if you wouldn't care much about performance (which is already a bad idea on an infrastructure as expensive as LUMI). Containers are really only guaranteed to be portable between similar systems. When well built, they are more portable than just a binary as you may be able to deal with missing or different libraries in the container, but that is where it ends. Containers are usually built for a particular CPU architecture and GPU architecture, two elements where everybody can easily see that if you change this, the container will not run. But there is in fact more: containers talk to other hardware too, and on an HPC system the first piece of hardware that comes to mind is the interconnect. And they use the kernel of the host and the kernel modules and drivers provided by that kernel. Those can be a problem. A container that is not build to support the SlingShot interconnect, may fall back to TCP sockets in MPI, completely killing scalability. Containers that expect the knem kernel extension for good intra-node MPI performance may not run as efficiently as LUMI uses xpmem instead.
So the "bring your own userland and run it on a system-optimised kernel" idea that proponents of containers promote, has two major flaws
-
Every set of userland libraries comes with certain expectations for kernel versions, kernel drivers and their versions, etc. If these expectations are not met, the container may not work at all or may work inefficiently.
-
Support for specific hardware is not done in the kernel alone. Most of the support for hardware, is actually in userland. E.g., part of the support for the SlingShot network, is in the libfabric library and its CXI provider, which are userland elements. Container promoters will tell you that is not a problem and that you can inject those libraries in the container, but the reality is that that strategy not always works, as the library you have on the system may not be the right version for the container, or may need other libraries that conflict with the versions in the container.
And obviously support for a specific instruction set, is also in userland. If a binary is not compiled to benefit from the additional speed of new instructions in a newer architecture, no container runtime can inject that support.
But what can they then do on LUMI?¶
-
A very important reason to use containers on LUMI is reducing the pressure on the file system by software that accesses many thousands of small files (Python and R users, you know who we are talking about). That software kills the metadata servers of almost any parallel file system when used at scale.
As a container on LUMI is a single file, the metadata servers of the parallel file system have far less work to do, and all the file caching mechanisms can also work much better.
-
Software installations that would otherwise be impossible. E.g., some software may not even be suited for installation in a multi-user HPC system as it uses fixed paths that are not compatible with installation in module-controlled software stacks. HPC systems want a lightweight
/usretc. structure as that part of the system software is often stored in a RAM disk, and to reduce boot times. Moreover, different users may need different versions of a software library so it cannot be installed in its default location in the system software region. However, some software is ill-behaved and cannot be relocated to a different directory, and in these cases containers help you to build a private installation that does not interfere with other software on the system.They are also of interest if compiling the software takes too much work while any processor-specific optimisation that could be obtained by compiling oneself, isn't really important. E.g., if a full stack of GUI libraries is needed, as they are rarely the speed-limiting factor in an application.
-
As an example, Conda installations are not appreciated on the main Lustre file system.
On one hand, Conda installations tend to generate lots of small files (and then even more due to a linking strategy that does not work on Lustre). So they need to be containerised just for storage manageability.
They also re-install lots of libraries that may already be on the system in a different version. The isolation offered by a container environment may be a good idea to ensure that all software picks up the right versions.
-
An example of software that is usually very hard to install is a GUI application, as they tend to have tons of dependencies and recompiling can be tricky. Yet rather often the binary packages that you can download cannot be installed wherever you want, so a container can come to the rescue.
-
Another example where containers have proven to be useful on LUMI is to experiment with newer versions of ROCm than we can offer on the system.
This often comes with limitations though, as (a) that ROCm version is still limited by the drivers on the system and (b) we've seen incompatibilities between newer ROCm versions and the Cray MPICH libraries.
-
And a combination of both: LUST with the help of AMD have prepared some containers with popular AI applications. These containers use some software from Conda, a newer ROCm version installed through RPMs, and some performance-critical code that is compiled specifically for LUMI.
-
Isolation is often considered as an advantage of containers also. The isolation helps preventing that software picks up libraries it should not pick up. In a context with multiple services running on a single server, it limits problems when the security of a container is compromised to that container. However, it also comes with a big disadvantage in an HPC context: Debugging and performance profiling also becomes a lot harder.
In fact, with the current state of container technology, it is often a pain also when running MPI applications as it would be much better to have only a single container per node, running MPI inside the container at the node level and then between containers on different nodes.
Remember though that whenever you use containers, you are the system administrator and not LUST. We can impossibly support all different software that users want to run in containers, and all possible Linux distributions they may want to run in those containers. We provide some advice on how to build a proper container, but if you chose to neglect it it is up to you to solve the problems that occur.
Managing containers¶
On LUMI, we currently support only one container runtime.
Docker is not available, and will never be on the regular compute nodes as it requires elevated privileges to run the container which cannot be given safely to regular users of the system.
Singularity is currently the only supported container runtime and is available on the login nodes and the compute nodes. It is a system command that is installed with the OS, so no module has to be loaded to enable it. We can also offer only a single version of singularity or its close cousin AppTainer as singularity/AppTainer simply don't really like running multiple versions next to one another, and currently the version that we offer is determined by what is offered by the OS. Currently we offer Singularity Community Edition 4.1.3.
To work with containers on LUMI you will either need to pull the container from a container registry,
e.g., DockerHub, bring in the container either by creating a tarball from a
docker container on the remote system and then converting that to the singularity .sif format on LUMI
or by copying the singularity .sif file, or use those container build features of singularity
that can be supported on LUMI within the security constraints
(which is why there are no user namespaces on LUMI).
Singularity does offer a command to pull in a Docker container and to convert it to singularity format. E.g., to pull a container for the Julia language from DockerHub, you'd use
singularity pull docker://julia
Singularity uses a single flat sif file for storing containers. The singularity pull command does the
conversion from Docker format to the singularity format.
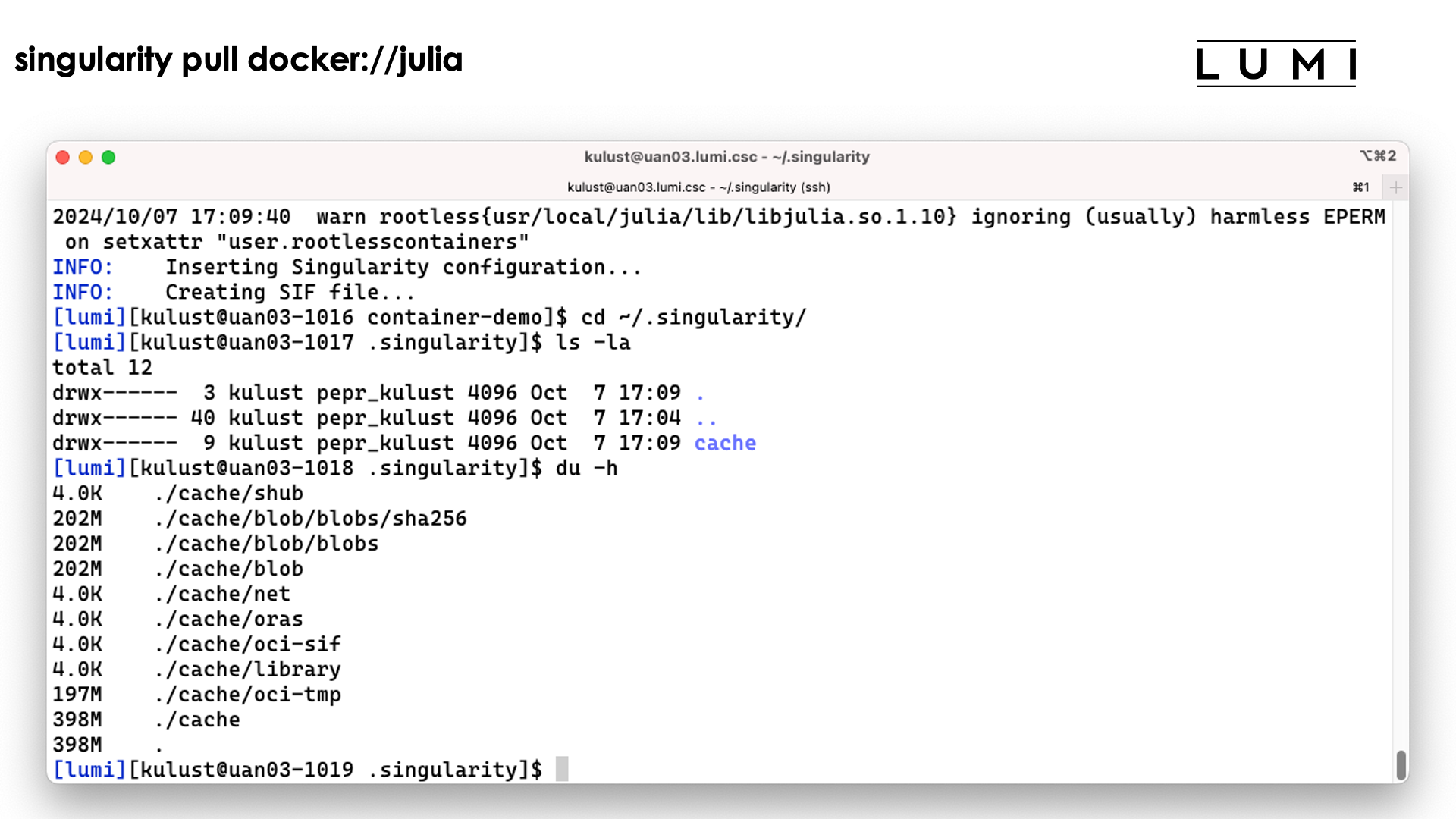
Singularity caches files during pull operations and that may leave a mess of files in
the .singularity cache directory. This can lead to exhaustion of your disk quota for your
home directory. So you may want to use the environment variable SINGULARITY_CACHEDIR
to put the cache in, e.g,, your scratch space (but even then you want to clean up after the
pull operation so save on your storage billing units).
Demo singularity pull
Let's try the singularity pull docker://julia command:
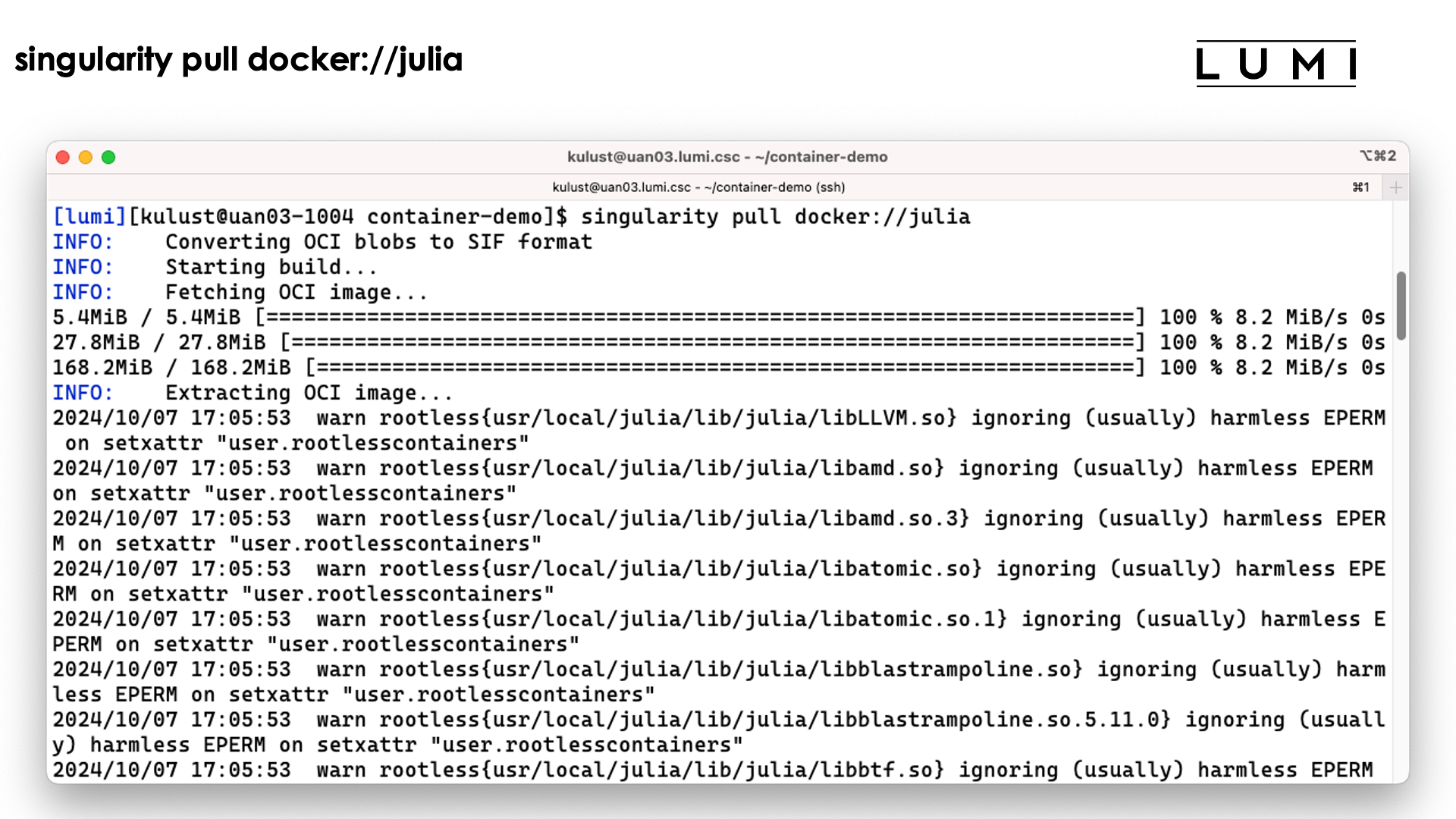
We do get a lot of warnings but usually this is perfectly normal and usually they can be safely ignored.
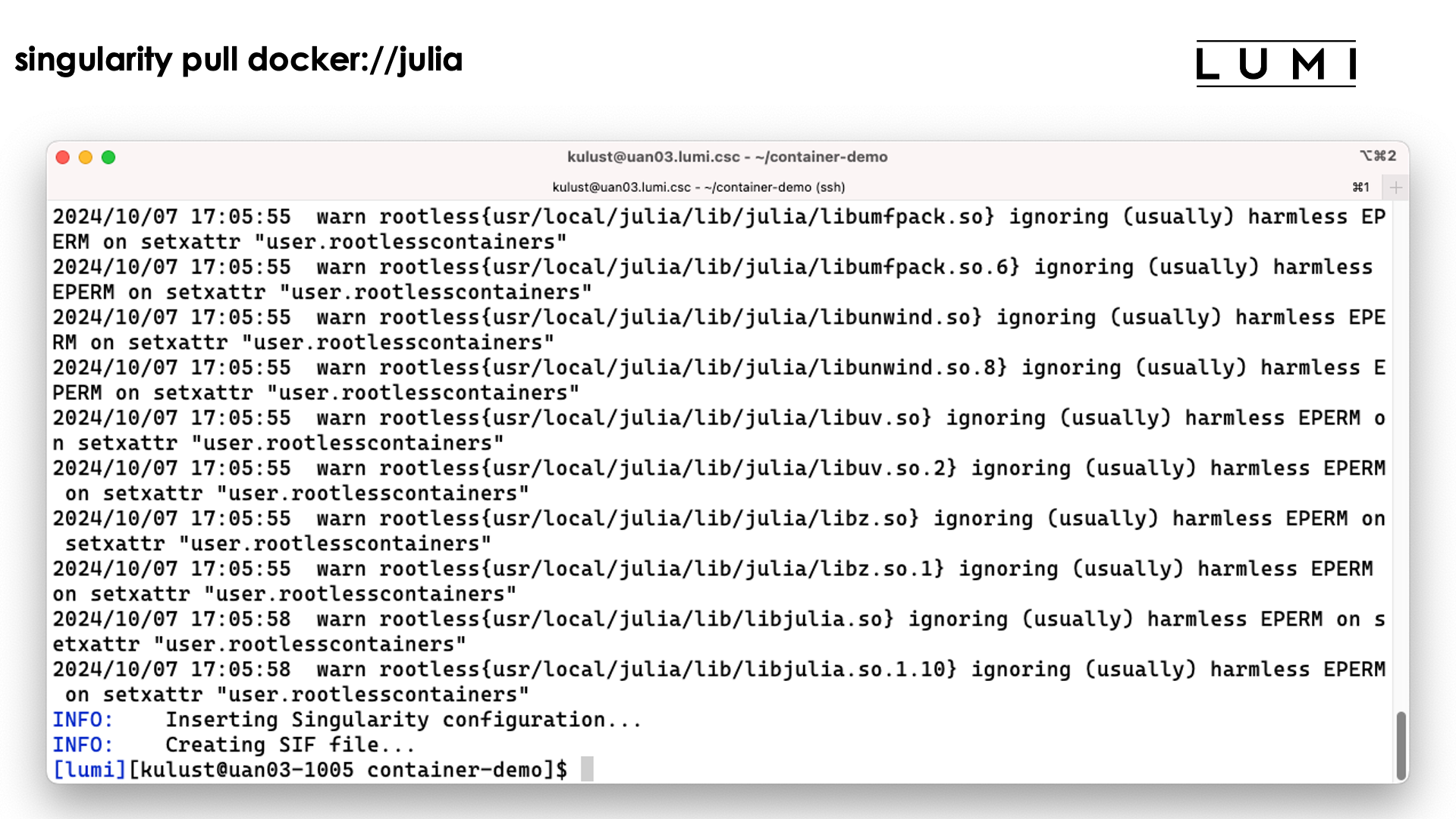
The process ends with the creation of the file jula_latest.sif.
Note however that the process has left a considerable number of files in ~/.singularity also:
There is currently limited support for building containers on LUMI and I do not expect that to change quickly. Container build strategies that require elevated privileges, and even those that require user namespaces, cannot be supported for security reasons (as user namespaces in Linux are riddled with security issues). Enabling features that are known to have had several serious security vulnerabilities in the recent past, or that themselves are unsecure by design and could allow users to do more on the system than a regular user should be able to do, will never be supported.
So you should pull containers from a container repository, or build the container on your own workstation and then transfer it to LUMI.
There is some support for building on top of an existing singularity container using what the SingularityCE user guide
calls "unprivileged proot builds".
This requires loading the proot command which is provided by the systools module
in CrayEnv or LUMI/23.09 or later. The SingularityCE user guide
mentions several restrictions of this process.
The general guideline from the manual is: "Generally, if your definition file starts from an existing SIF/OCI container image,
and adds software using system package managers, an unprivileged proot build is appropriate.
If your definition file compiles and installs large complex software from source,
you may wish to investigate --remote or --fakeroot builds instead." But as we just said,
on LUMI we cannot yet
provide --fakeroot builds due to security constraints.
We are also working on a number of base images to build upon, where the base images are tested with the OS kernel on LUMI (and some for ROCm are already there).
Interacting with containers¶
There are basically three ways to interact with containers.
If you have the sif file already on the system you can enter the container with an interactive shell:
singularity shell container.sif
Demo singularity shell
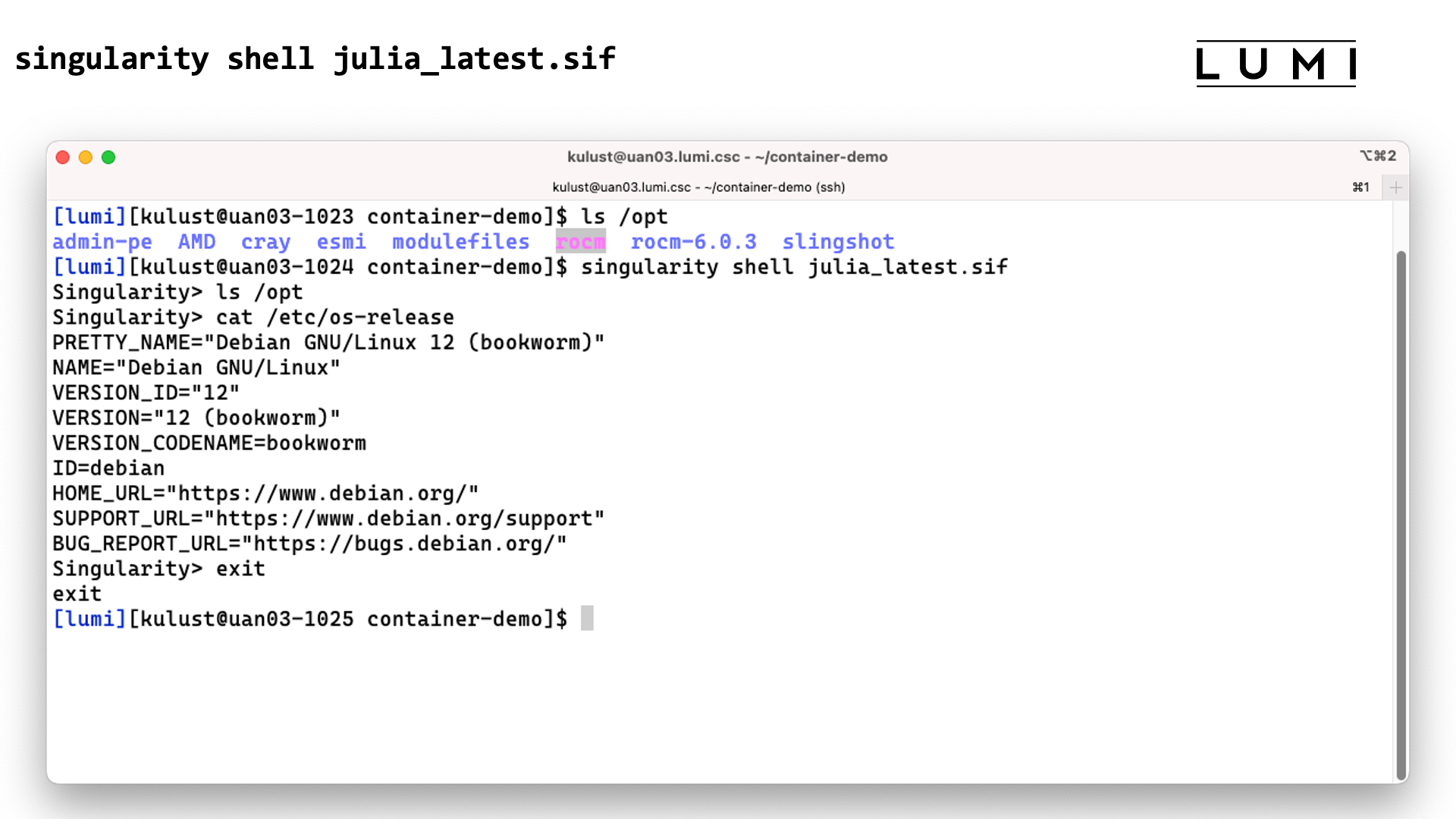
In this screenshot we checked the contents of the /opt directory before and after the
singularity shell julia_latest.sif command. This shows that we are clearly in a different
environment. Checking the /etc/os-release file only confirms this as LUMI runs SUSE Linux
on the login nodes, not a version of Debian.
The second way is to execute a command in the container with singularity exec. E.g., assuming the
container has the uname executable installed in it,
singularity exec container.sif uname -a
Demo singularity exec
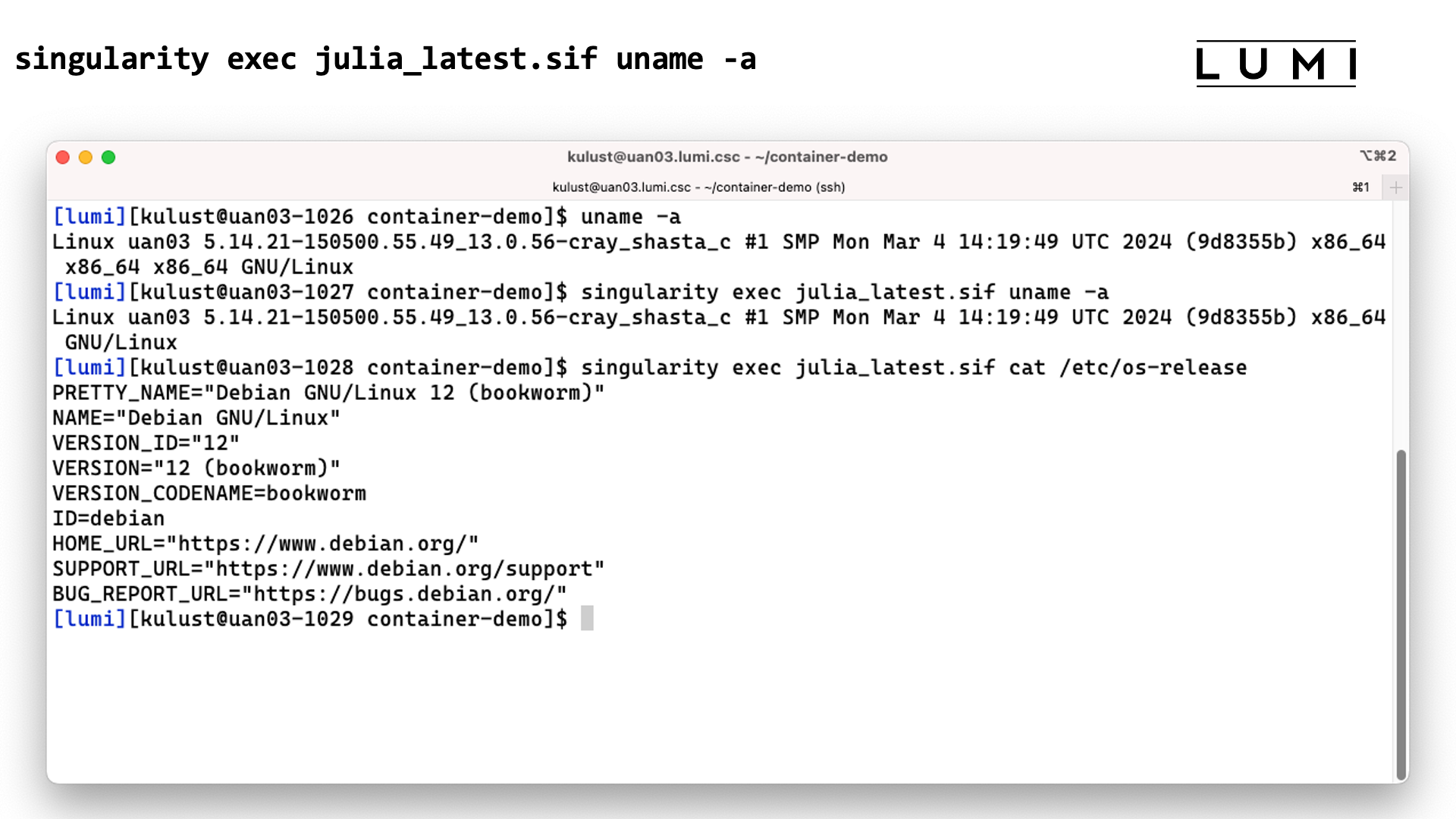
In this screenshot we execute the uname -a command before and with the
singularity exec julia_latest.sif command. There are some slight differences in the
output though the same kernel version is reported as the container uses the host kernel.
Executing
singularity exec julia_latest.sif cat /etc/os-release
confirms though that the commands are executed in the container.
The third option is often called running a container, which is done with singularity run:
singularity run container.sif
It does require the container to have a special script that tells singularity what
running a container means. You can check if it is present and what it does with singularity inspect:
singularity inspect --runscript container.sif
Demo singularity run
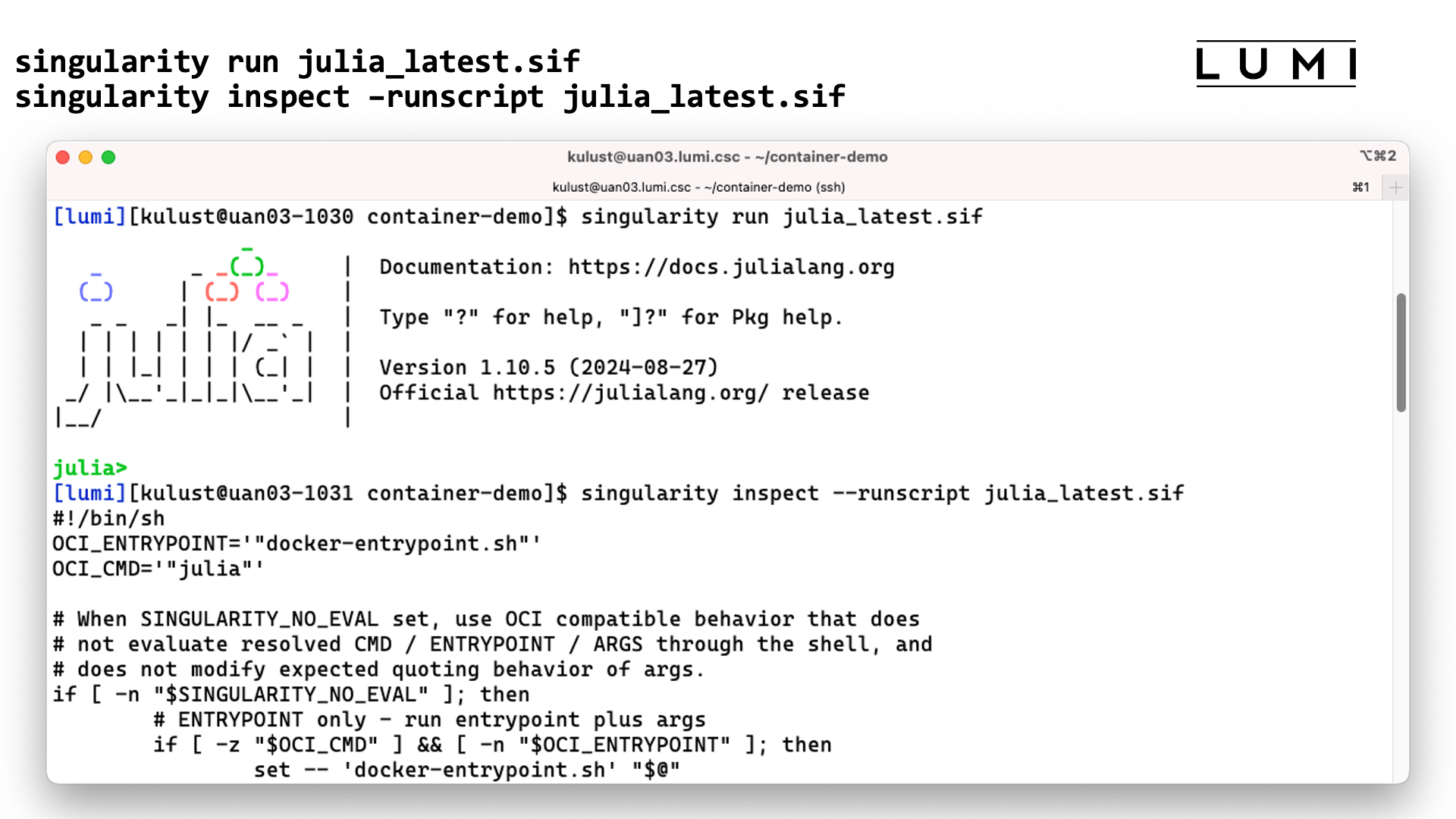
In this screenshot we start the julia interface in the container using
singularity run. The second command shows that the container indeed
includes a script to tell singularity what singularity run should do.
You want your container to be able to interact with the files in your account on the system.
Singularity will automatically mount $HOME, /tmp, /proc, /sys and /dev in the container,
but this is not enough as your home directory on LUMI is small and only meant to be used for
storing program settings, etc., and not as your main work directory. (And it is also not billed
and therefore no extension is allowed.) Most of the time you want to be able to access files in
your project directories in /project, /scratch or /flash, or maybe even in /appl.
To do this you need to tell singularity to also mount these directories in the container,
either using the
--bind src1:dest1,src2:dest2
flag or via the SINGULARITY_BIND or SINGULARITY_BINDPATH environment variables.
E.g.,
export SINGULARITY_BIND='/pfs,/scratch,/projappl,/project,/flash'
will ensure that you have access to the scratch, project and flash directories of your project.
For some containers that are provided by the LUMI User Support Team, modules are also available that
set SINGULARITY_BINDPATH so that all necessary system libraries are available in the container and
users can access all their files using the same paths as outside the container.
Running containers on LUMI¶
Just as for other jobs, you need to use Slurm to run containers on the compute nodes.
For MPI containers one should use srun to run the singularity exec command, e.g,,
srun singularity exec --bind ${BIND_ARGS} \
${CONTAINER_PATH} mp_mpi_binary ${APP_PARAMS}
(and replace the environment variables above with the proper bind arguments for --bind, container file and
parameters for the command that you want to run in the container).
On LUMI, the software that you run in the container should be compatible with Cray MPICH, i.e., use the MPICH ABI (currently Cray MPICH is based on MPICH 3.4). It is then possible to tell the container to use Cray MPICH (from outside the container) rather than the MPICH variant installed in the container, so that it can offer optimal performance on the LUMI Slingshot 11 interconnect.
Open MPI containers are currently not well supported on LUMI and we do not recommend using them. We only have a partial solution for the CPU nodes that is not tested in all scenarios, and on the GPU nodes Open MPI is very problematic at the moment. This is due to some design issues in the design of Open MPI, and also to some piece of software that recent versions of Open MPI require but that HPE only started supporting recently on Cray EX systems and that we haven't been able to fully test. Open MPI has a slight preference for the UCX communication library over the OFI libraries, and until version 5 full GPU support requires UCX. Moreover, binaries using Open MPI often use the so-called rpath linking process so that it becomes a lot harder to inject an Open MPI library that is installed elsewhere. The good news though is that the Open MPI developers of course also want Open MPI to work on biggest systems in the USA, and all three currently operating or planned exascale systems use the Slingshot 11 interconnect, so work is going on for better support for OFI in general and Cray Slingshot in particular and for full GPU support.
Enhancements to the environment¶
To make life easier, LUST with the support of CSC did implement some modules that are either based on containers or help you run software with containers.
Bindings for singularity¶
The singularity-bindings/system module which can be installed via EasyBuild
helps to set SINGULARITY_BIND and SINGULARITY_LD_LIBRARY_PATH to use
Cray MPICH. Figuring out those settings is tricky, and sometimes changes to the
module are needed for a specific situation because of dependency conflicts
between Cray MPICH and other software in the container, which is why we don't
provide it in the standard software stacks but instead make it available as
an EasyBuild recipe that you can adapt to your situation and install.
As it needs to be installed through EasyBuild, it is really meant to be
used in the context of a LUMI software stack (so not in CrayEnv).
To find the EasyConfig files, load the EasyBuild-user module and
run
eb --search singularity-bindings
You can also check the
page for the singularity-bindings in the LUMI Software Library.
You may need to change the EasyConfig for your specific purpose though.
E.g., the singularity command line option --rocm to import the ROCm installation
from the system doesn't fully work (and in fact, as we have alternative ROCm versions
on the system cannot work in all cases) but that can also be fixed by extending
the singularity-bindings module
(or by just manually setting the proper environment variables).
VNC container¶
The second tool is a container that we provide with some bash functions
to start a VNC server as one way to run GUI programs and as an alternative to
the (currently more sophisticated) VNC-based GUI desktop setup offered in Open OnDemand
(see the "Getting Access to LUMI notes").
It can be used in CrayEnv or in the LUMI stacks through the
lumi-vnc module.
The container also
contains a poor men's window manager (and yes, we know that there are sometimes
some problems with fonts). It is possible to connect to the VNC server either
through a regular VNC client on your PC or a web browser, but in both cases you'll
have to create an ssh tunnel to access the server. Try
module help lumi-vnc
for more information on how to use lumi-vnc.
For most users, the Open OnDemand web interface and tools offered in that interface will be a better alternative.
cotainr: Build Conda containers on LUMI¶
The third tool is cotainr,
a tool developed by DeIC, the Danish partner in the LUMI consortium.
It is a tool to pack a Conda installation into a container. It runs entirely in user space and doesn't need
any special rights. (For the container specialists: It is based on the container sandbox idea to build
containers in user space.)
Containers build with cotainr are used just as other containers, so through the singularity commands discussed
before.
AI course
The cotainr tool is also used extensively in our
AI training/workshop
to build containers with AI software on top of some
ROCmTM containers that we provide.
Container wrapper for Python packages and conda¶
The fourth tool is a container wrapper tool that users from Finland may also know
as Tykky (the name on their national systems).
It is a tool to wrap Python and conda installations in a container and then
create wrapper scripts for the commands in the bin subdirectory so that for most
practical use cases the commands can be used without directly using singularity
commands.
Whereas cotainr fully exposes the container to users and its software is accessed
through the regular singularity commands, Tykky tries to hide this complexity with
wrapper scripts that take care of all bindings and calling singularity.
On LUMI, it is provided by the lumi-container-wrapper
module which is available in the CrayEnv environment and in the LUMI software stacks.
The tool can work in four modes:
-
It can create a conda environment based on a Conda environment file and create wrapper scripts for that installation.
-
It can install a number of Python packages via
pipand create wrapper scripts. On LUMI, this is done on top of one of thecray-pythonmodules that already contain optimised versions of NumPy, SciPy and pandas. Python packages are specified in arequirements.txtfile used bypip. -
It can do a combination of both of the above: Install a Conda-based Python environment and in one go also install a number of additional Python packages via
pip. -
The fourth option is to use the container wrapper to create wrapper scripts for commands in an existing container.
For the first three options, the container wrapper will then perform the installation
in a work directory, create some wrapper commands in the bin subdirectory of the directory
where you tell the container wrapper tool to do the installation,
and it will use SquashFS to create as single file
that contains the conda or Python installation. So strictly speaking it does not create a
container, but a SquashFS file that is then mounted in a small existing base container.
However, the wrappers created for all commands in the bin subdirectory of the conda or
Python installation take care of doing the proper bindings. If you want to use the container
through singularity commands however, you'll have to do that mounting by hand, including
mounting the SquashFS file on the right directory in the container.
Note that the wrapper scripts may seem transparent, but running a script that contains the wrapper commands outside the container may have different results from running the same script inside the container. After all, the script that runs outside the container sees a different environment than the same script running inside the container.
We do strongly recommend to use cotainr or the container wrapper tool for larger conda and Python installation.
We will not raise your file quota if it is to house such installation in your /project directory.
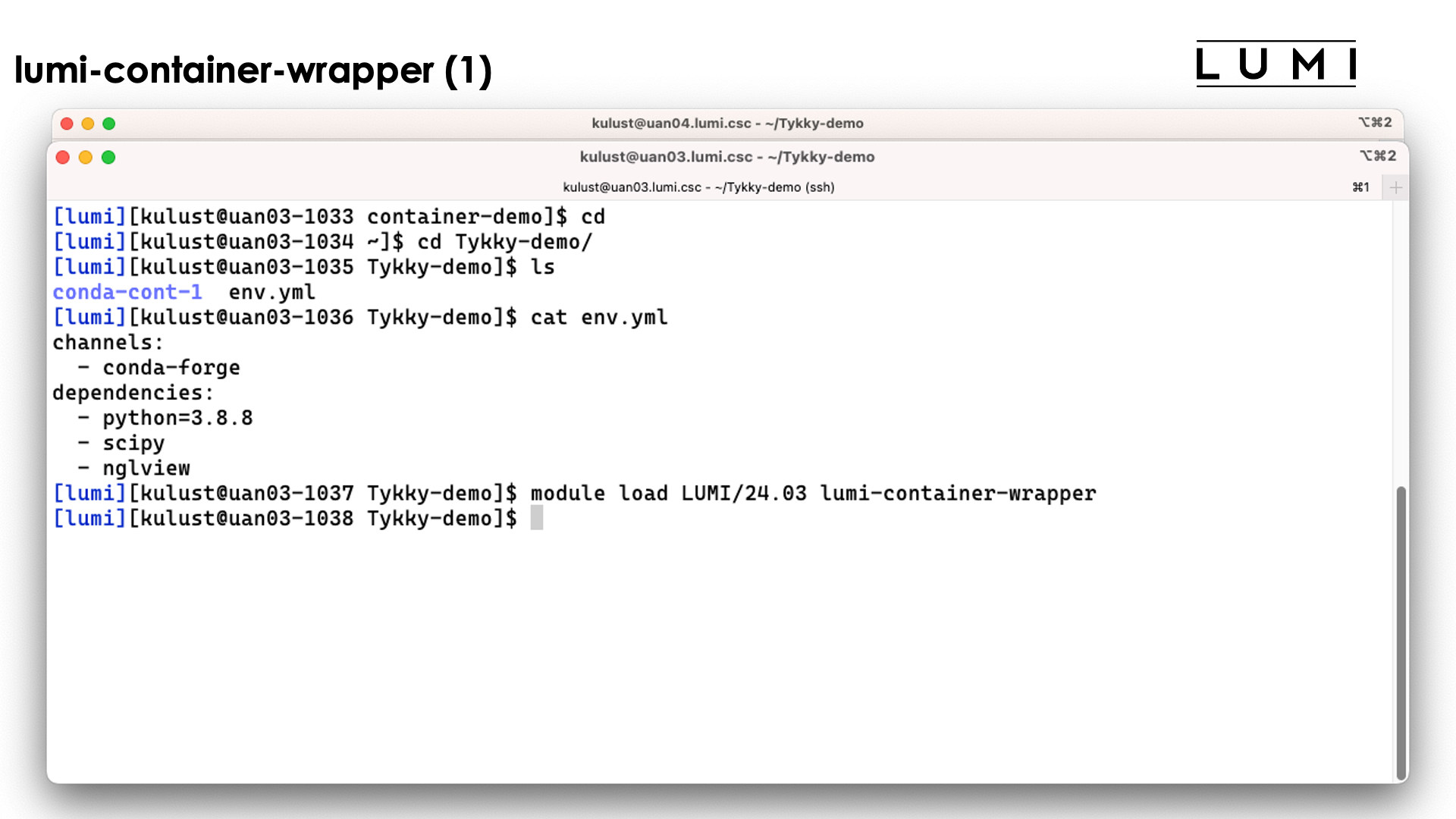
Demo lumi-container-wrapper for a Conda installation
Create a subdirectory to experiment. In that subdirectory, create a file named env.yml with
the content:
channels:
- conda-forge
dependencies:
- python=3.8.8
- scipy
- nglview
and create an empty subdirectory conda-cont-1.
Now you can follow the commands on the slides below:
On the slide above we prepared the environment.
Now lets run the command
conda-containerize new --prefix ./conda-cont-1 env.yml
and look at the output that scrolls over the screen. The screenshots don't show the full output as some parts of the screen get overwritten during the process:
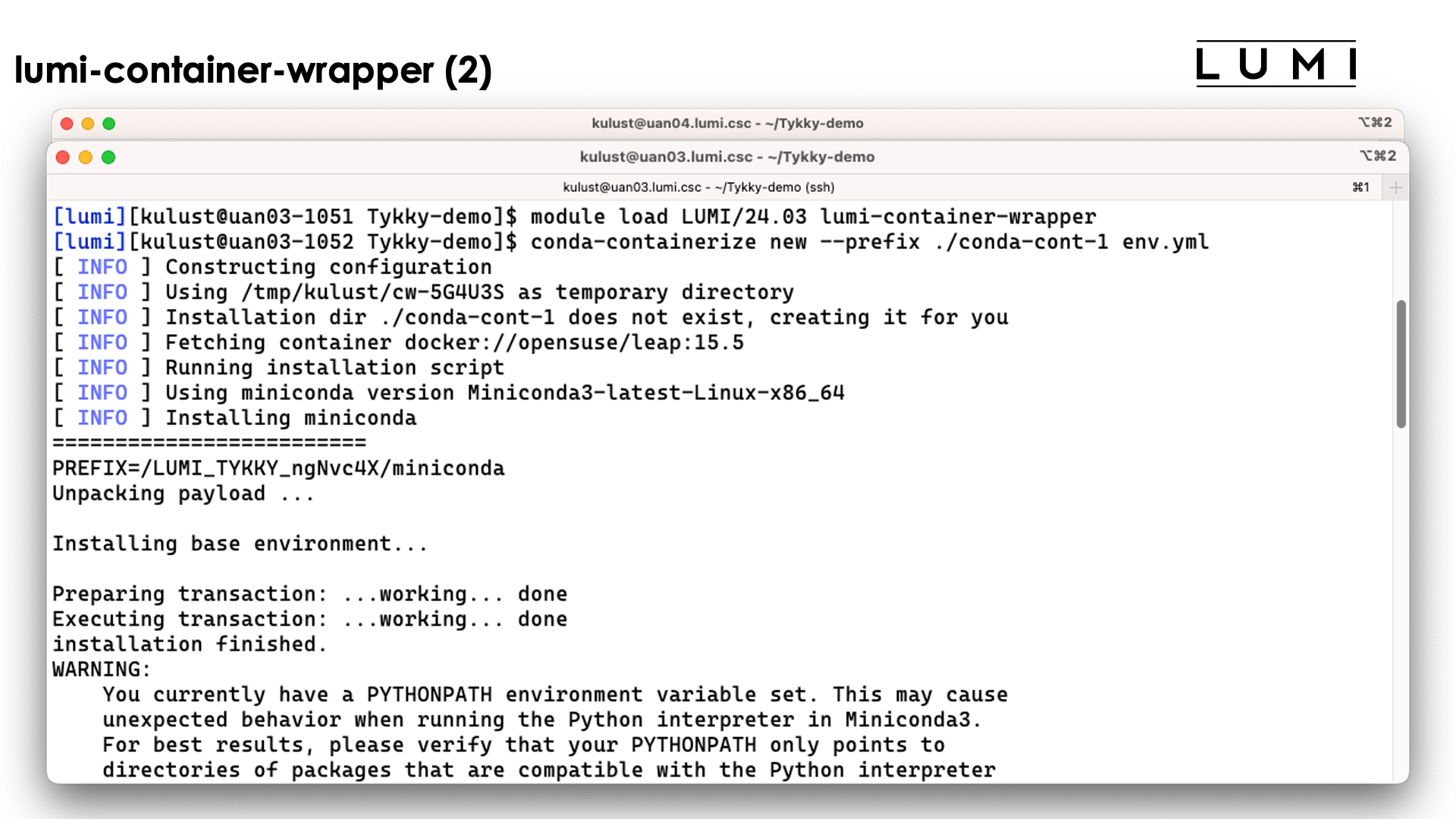
The tool will first build the conda installation in a tempororary work directory and also uses a base container for that purpose.
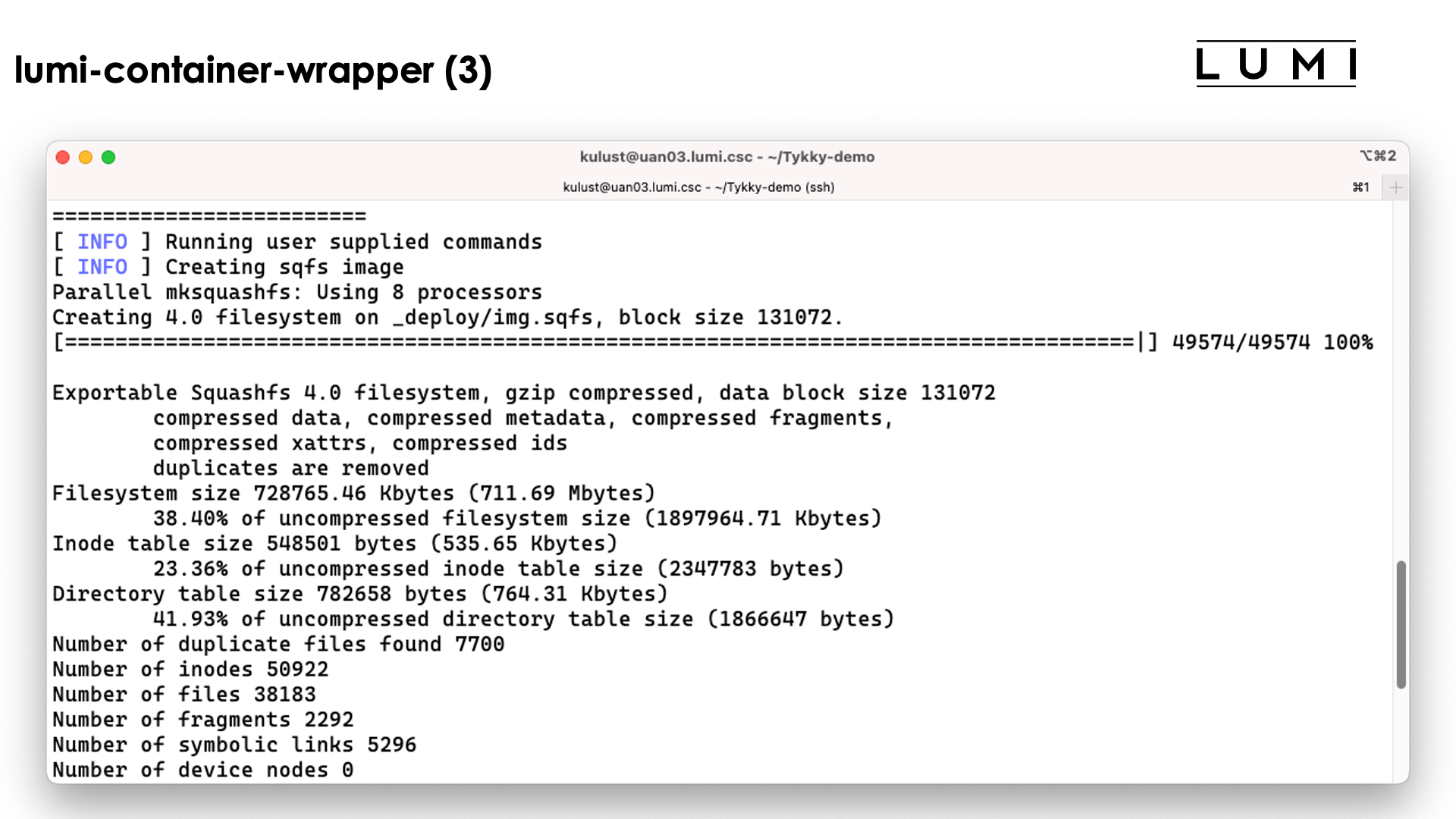
The conda installation itself though is stored in a SquashFS file that is then used by the container.
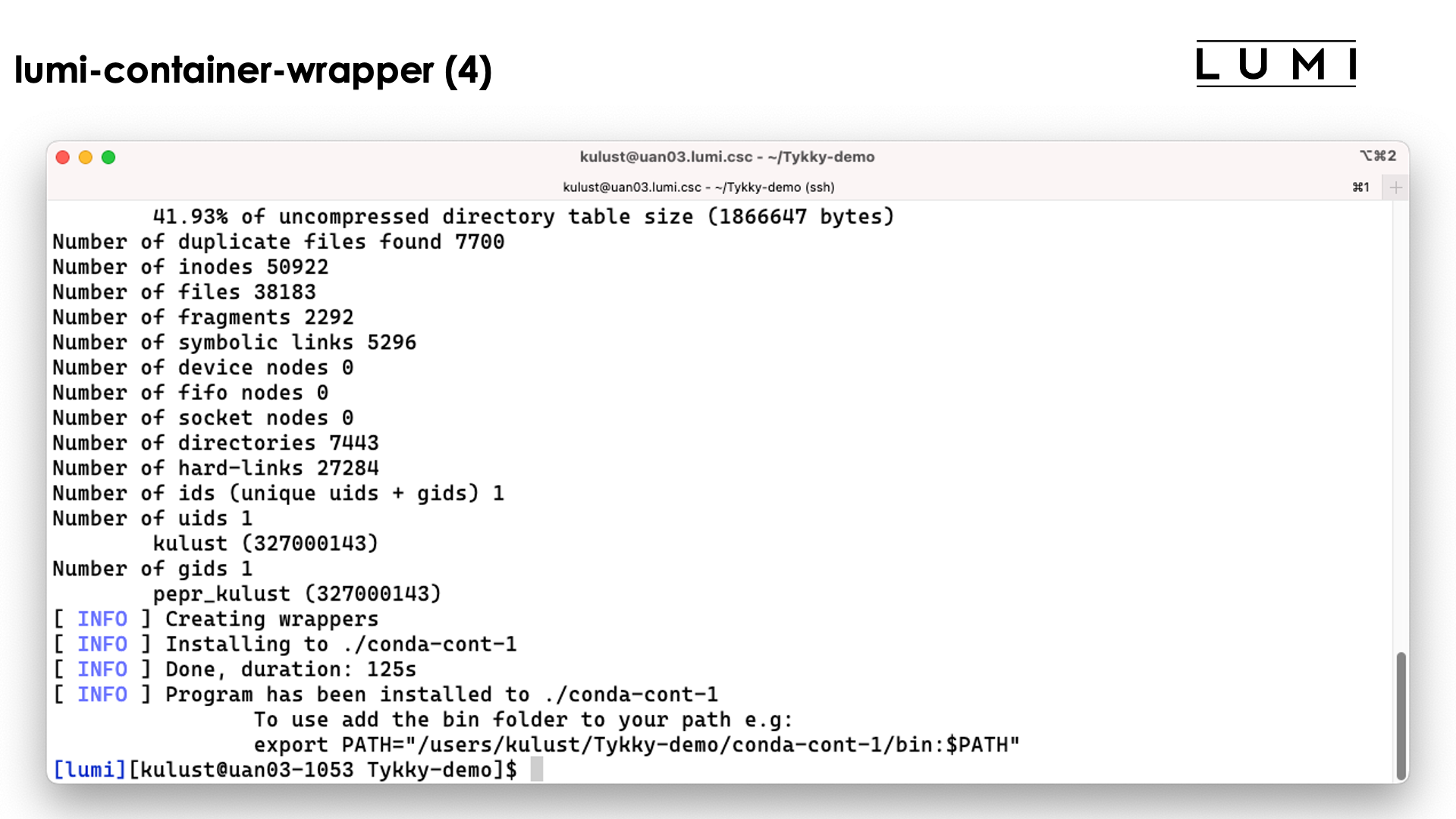
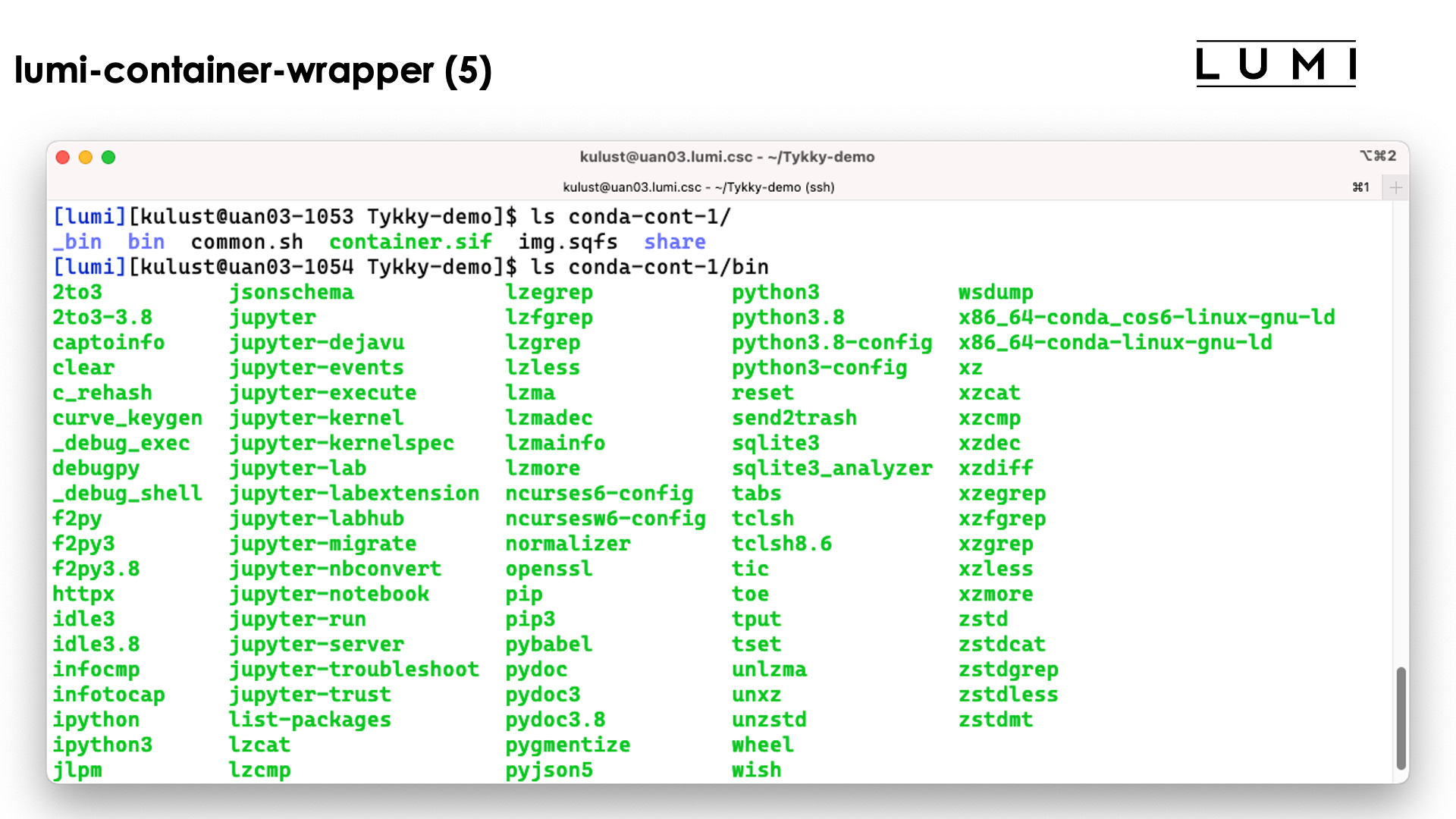
In the slide above we see the installation contains both a singularity container and a SquashFS file. They work together to get a working conda installation.
The bin directory seems to contain the commands, but these are in fact scripts
that run those commands in the container with the SquashFS file system mounted in it.
So as you can see above, we can simply use the python3 command without realising
what goes on behind the screen...
Relevant documentation for lumi-container-wrapper
Pre-built AI containers¶
LUST with the help of AMD is also building some containers with popular AI software. These containers contain a ROCm version that is appropriate for the software, use Conda for some components, but have several of the performance critical components built specifically for LUMI for near-optimal performance. Depending on the software they also contain a RCCL library with the appropriate plugin to work well on the Slingshot 11 interconnect, or a horovod compiled to use Cray MPICH.
Some of the containers can be provided through a module that is user-installable with EasyBuild.
That module sets the SINGULARITY_BIND environment variable
to ensure proper bindings (as they need, e.g., the libfabric library from the system and the proper
"CXI provider" for libfabric to connect to the Slingshot interconnect). The module will also provide
an environment variable to refer to the container (name with full path) to make it easy to refer to
the container in job scripts. Some of the modules also provide some scripts that may make using the containers easier in some standard scenarios. Alternatively, the user support team is also working
on some modules for users who want to run the containers as manually as possible yet want an
easy way to deal with the necessary bindings of user file systems and HPE Cray PE components needed
from the system (see also course materials for the AI training/workshop).
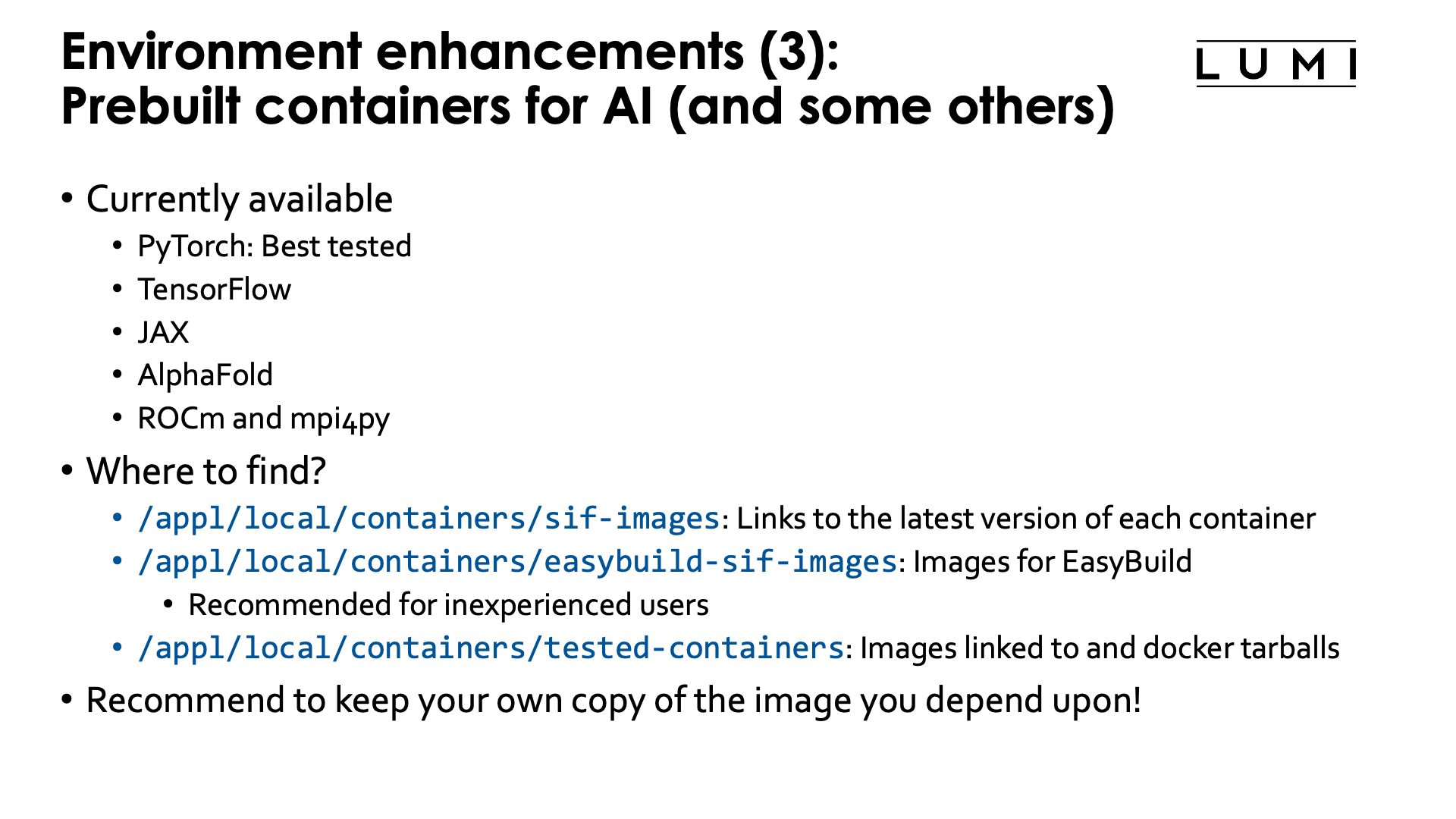
These containers can be found through the LUMI Software Library and are marked with a container label. At the time of the course, there are containers for
- PyTorch, which is the best tested and most developed one,
- TensorFlow,
- JAX,
- AlphaFold,
- ROCm and
- mpi4py.
Running the AI containers - complicated way without modules¶
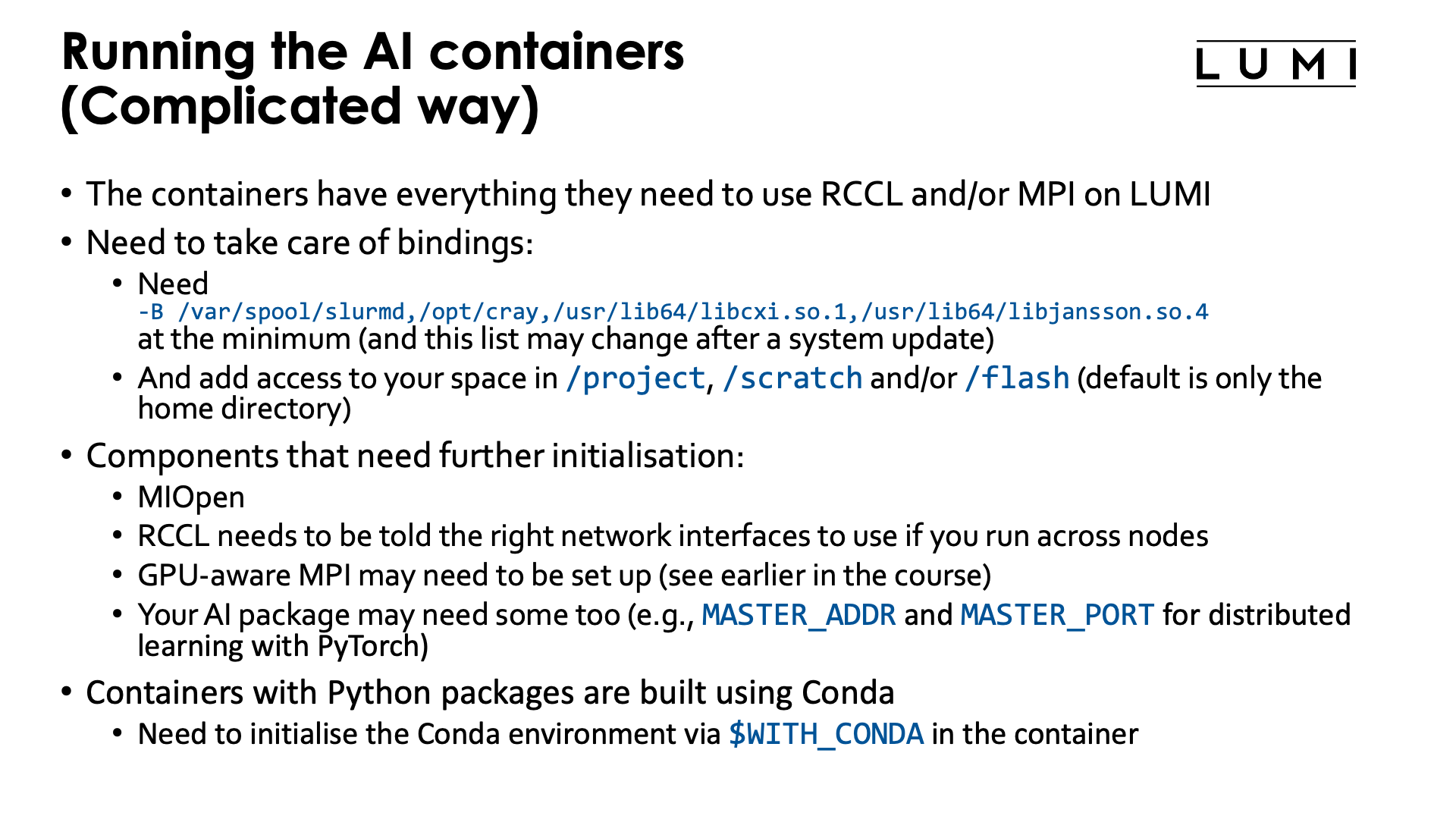
The containers that we provide have everything they need to use RCCL and/or MPI on LUMI.
It is not needed to use the singularity-bindings/system module described earlier as that module
tries to bind too much external software to the container.
Yet to be able to properly use the containers, users do need to take care of some bindings
-
Some system directories and libraries have to be bound to the container:
-B /var/spool/slurmd,/opt/cray,/usr/lib64/libcxi.so.1,/usr/lib64/libjansson.so.4The first one is needed to work together with Slurm. The second one contains the MPI and libfabric library. The third one is the actual component that binds libfabric to the Slingshot network adapter and is called the CXI provider, and the last one is a library that is needed by some LUMI system libraries but not (yet) in the container.
-
By default your home directory will be available in the container, but as your home directory is not your main workspace, you may want to bind your subdirectory in
/project,/scratchand/or/flashalso, using, e.g.,-B /pfs,/scratch,/projappl,/project,/flash
There are also a number of components that may need further initialisation:
-
The MIOpen library has problems with file/record locking on Lustre so some environment variables are needed to move some work directories.
-
RCCL needs to be told the right network interfaces to use as otherwise it tends to take the interface to the management network of the cluster instead and gets stuck.
-
GPU-aware MPI also needs to be set up (see earlier in the course)
-
Your AI package may need some environment variables too (e.g.,
MASTER_ADDRandMASTER_PORTfor distributed learning with PyTorch)
Moreover, most (if not all at the moment) containers that we provide with Python packages, are
built using Conda to install Python. When entering those containers, conda needs to be activated.
The containers are built in such a way that the environment variable WITH_CONDA provides the
necessary command, so in most cases you only need to run
$WITH_CONDA
as a command in the script that is executed in the container or on the command line.
Running the containers through EasyBuild-generated modules¶
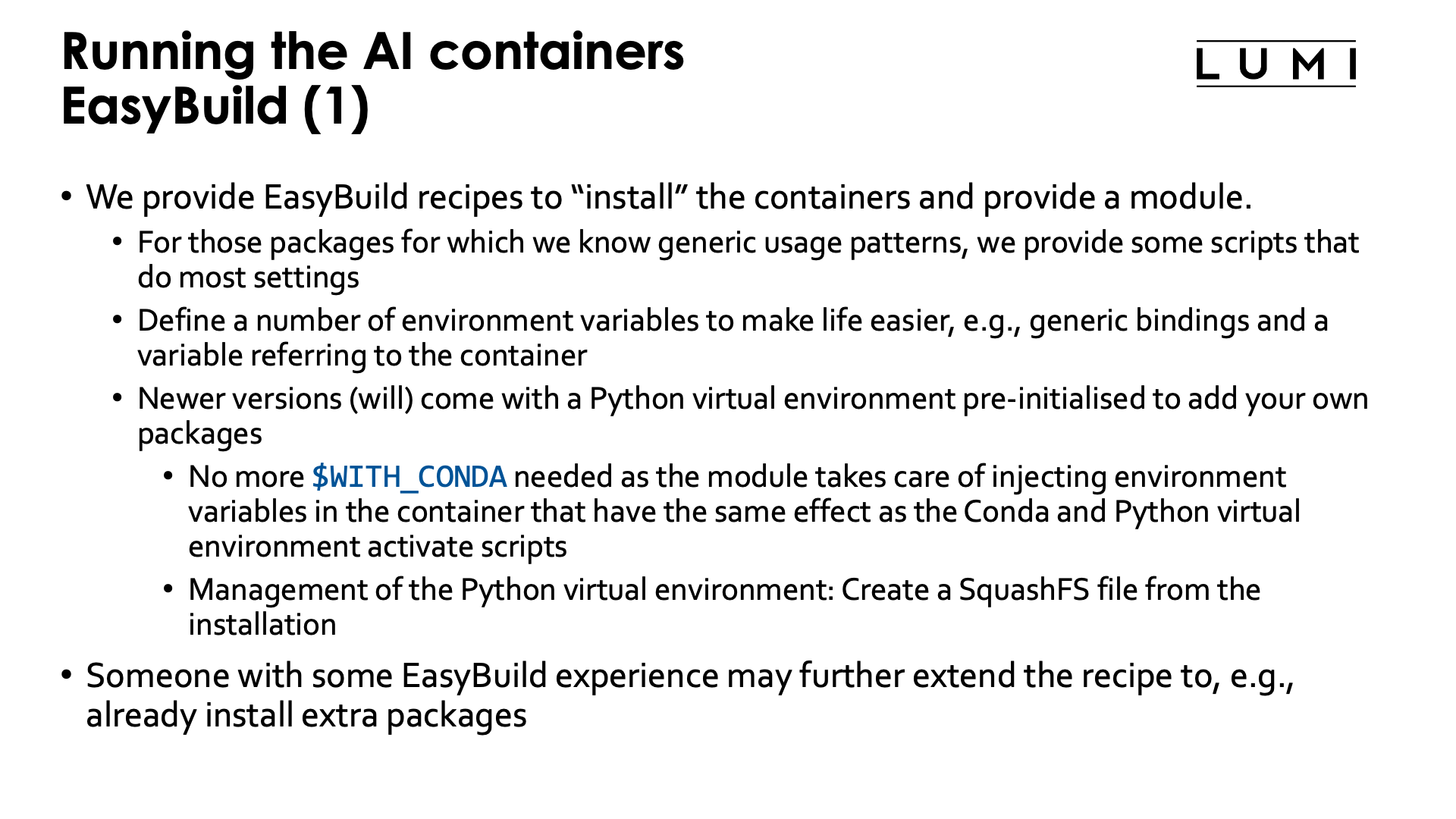
Doing all those initialisations, is a burden. Therefore we provide EasyBuild recipes to "install" the containers and to provide a module that helps setting environment variables in the initialisation.
For packages for which we know generic usage patterns, we provide some scripts that do most settings.
We may have to drop that though, as sometimes there are simply too many scenarios and promoting a particular
one too much may mislead users and encourage them to try to map their problem on an approach which
may be less efficient than theirs.
When using the module, those scripts will be available in the /runscripts directory in the container,
but are also in a subdirectory on the Lustre file system. So in principle you can even edit them or
add your own scripts, though they would be erased if you reinstall the module with EasyBuild.
They also define a number of environment variables that make life easier. E.g., the SINGULARITY_BINDPATH
environment variable is already set to bind the necessary files and directories from the system and to
make sure that your project, scratch and flash spaces are available at the same location as on LUMI so
that even symbolic links in those directories should still work.
Some container modules also set up a pre-configured virtual environment to add your own packages.
The virtual environment can be found in the container in a subdirectory of /user-software/venv. To install
packages from within the container, this directory needs to be writeable which is done by binding /user-software to the
$CONTAINERROOT/user-software subdirectory outside the container.
If you add a lot of packages that way, you re-create the filesystem issues that the container is supposed to
solve, but we have a solution for that also. These containers provide the make-squashfs command to generate
a SquashFS file from the installation that will be used by the container instead next time the module for
the container is reloaded. And in case you prefer to fully delete the user-software subdirectory afterwards
from $CONTAINERROOT, it can be re-created using unmake-squashfs so that you can add further packages.
You can also use /user-software to install software in other ways from within the container and can
basically create whatever subdirectory you want into it.
This is basically automating the procedure described
in the "Extending containers with virtual environments for faster testing" lecture
or our AI training.
These containers with pre-configured virtual environment offer another advantage also: The module injects a number of environment variables into the container so that it is no longer needed to activate the conda environment and Python virtual environment by sourcing scripts.
In fact, someone with EasyBuild experience may even help you to further extend the recipe that we provide to already install extra packages, and we provide an example of how to do that with our PyTorch containers.
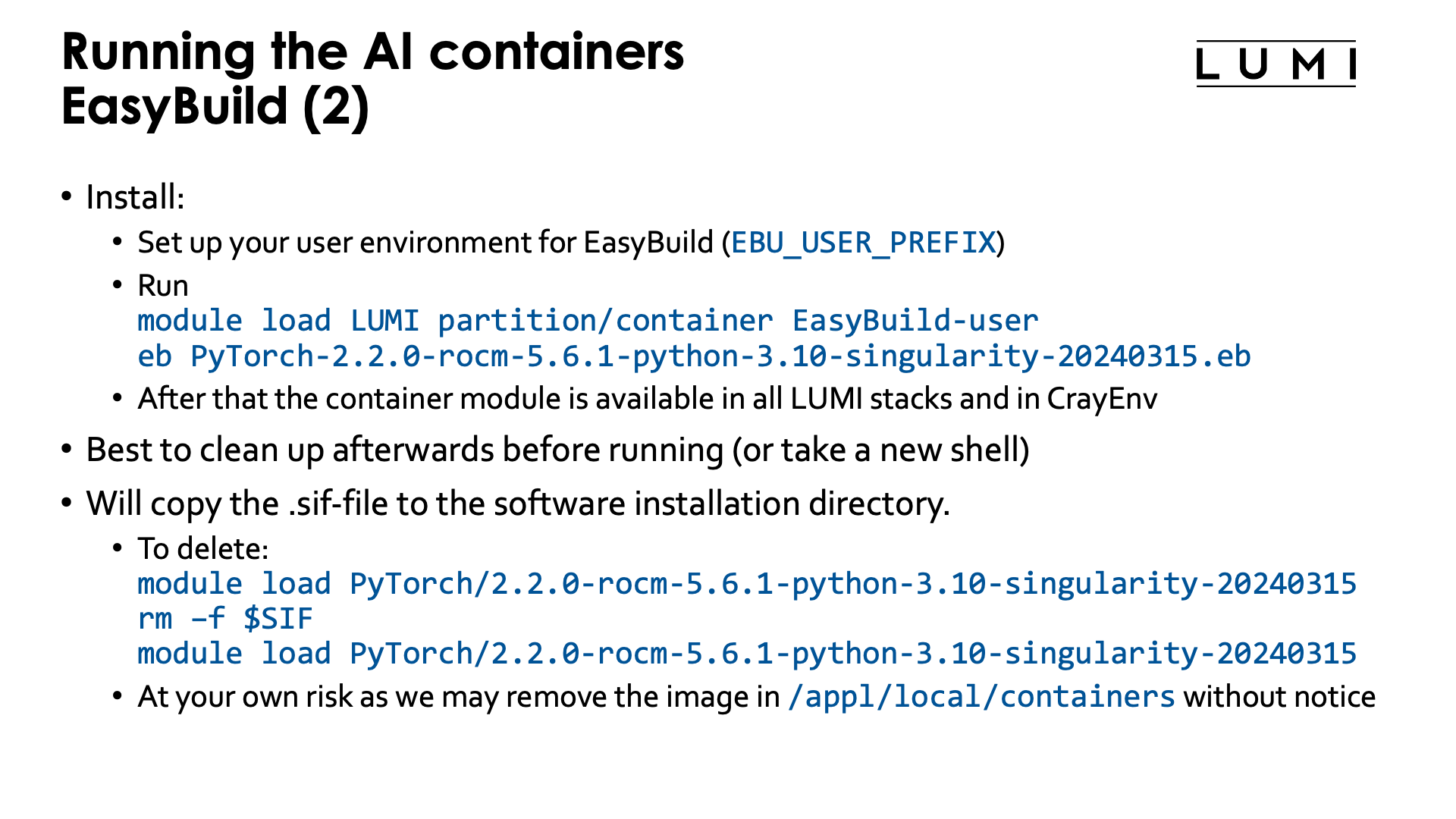
Installing the EasyBuild recipes for those containers is also done via the EasyBuild-user module,
but it is best to use a special trick. There is a special partition called partition/container that is
only used to install those containers and when using that partition for the installation, the container
will be available in all versions of the LUMI stack and in the CrayEnv stack.
Installation is as simple as, e.g.,
module load LUMI partition/container EasyBuild-user
eb PyTorch-2.2.0-rocm-5.6.1-python-3.10-singularity-20240315.eb
Before running it is best to clean up (module purge) or take a new shell to avoid conflicts with
environment variables provided by other modules.
The installation with EasyBuild will make a copy from the .sif Singularity container image file
that we provide somewhere in /appl/local/containers
to the software installation subdirectory of your $EBU_USER_PREFIX EasyBuild installation directory.
These files are big and you may wish to delete that file which is easily done: After loading the container
module, the environment variable SIF contains the name with full path of the container file.
After removing the container file from your personal software directory, you need to reload the container
module and from then on, SIF will point to the corresponding container in
/appl/local/containers/easybuild-sif-images.
We don't really recommend removing the container image though and certainly not if you are interested
in reproducibility. We may remove the image in /appl/local/containers/easybuild-sif-images
without prior notice if we notice that the container has too many problems, e.g., after a system
update. But that same container that doesn't work well for others, may work well enough for you that
you don't want to rebuild whatever environment you built with the container.
Example: Distributed learning without using EasyBuild¶
To really run this example, some additional program files and data files are needed that are not explained in this text. You can find more information on the PyTorch page in the LUMI Software Library.
We'll need to create a number of scripts before we can even run the container. The job script alone is not enough as there are also per-task initialisations needed that cannot be done directly in the job script. In this example, we run the script that does the per-task initialisations in the container, but it is also possible to do this outside the container which would give access to the Slurm commands and may even simplify a bit.
If you want to know more about running AI loads on LUMI, we strongly recommend to take a look at the course materials of the AI course. Basically, running AI on AMD GPUs is not that different from NIVIDA GPUs, but there are some initialisations that are different. The main difference may be the difference between cloud environments, clusters with easy access to the compute nodes and clusters like LUMI that require you to always go through the resource manager if you want access to a compute node.
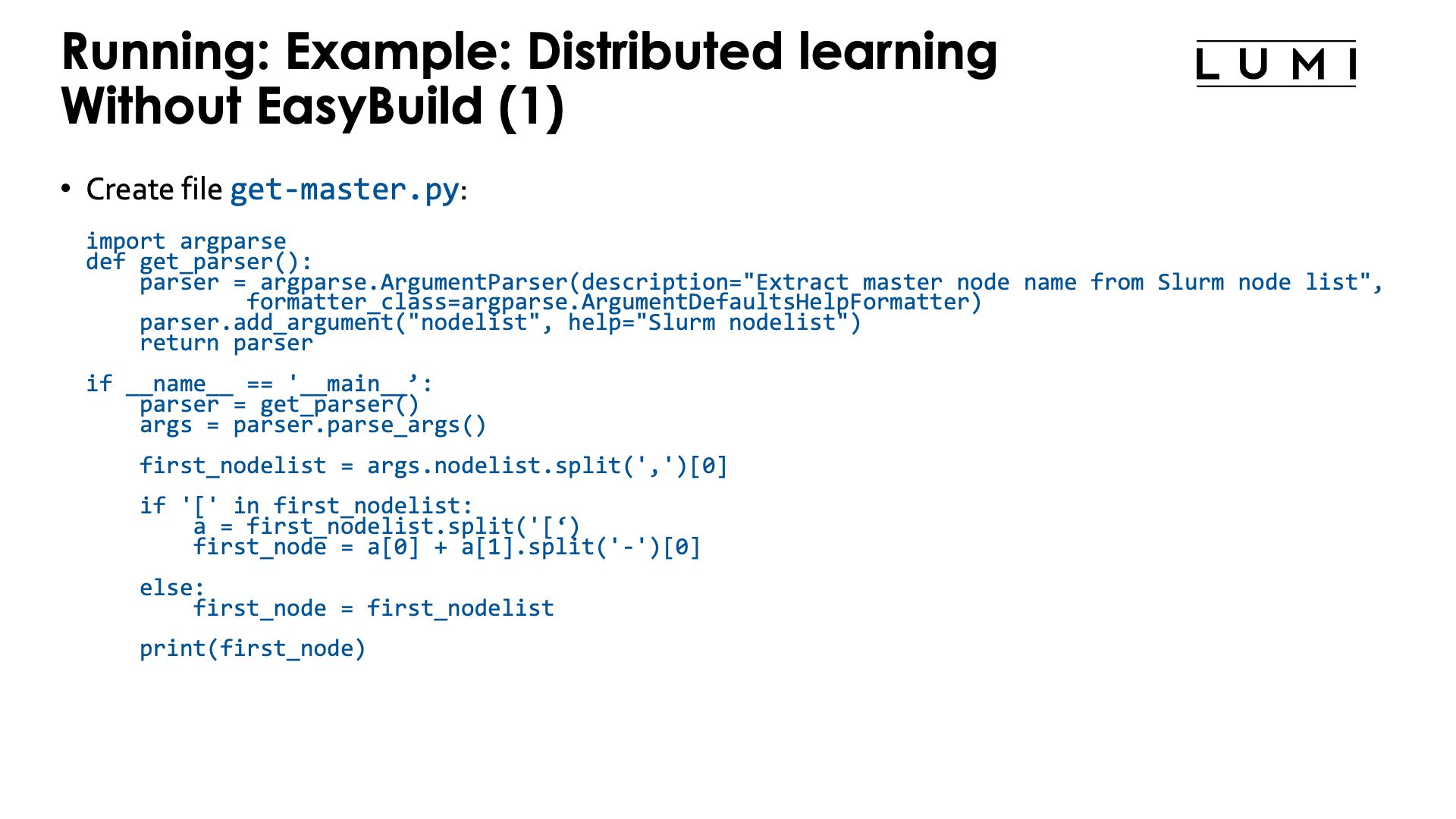
The first script is a Python program to extract the name of the master node from a Slurm environment
variable. Store it in get-master.py:
import argparse
def get_parser():
parser = argparse.ArgumentParser(description="Extract master node name from Slurm node list",
formatter_class=argparse.ArgumentDefaultsHelpFormatter)
parser.add_argument("nodelist", help="Slurm nodelist")
return parser
if __name__ == '__main__':
parser = get_parser()
args = parser.parse_args()
first_nodelist = args.nodelist.split(',')[0]
if '[' in first_nodelist:
a = first_nodelist.split('[')
first_node = a[0] + a[1].split('-')[0]
else:
first_node = first_nodelist
print(first_node)
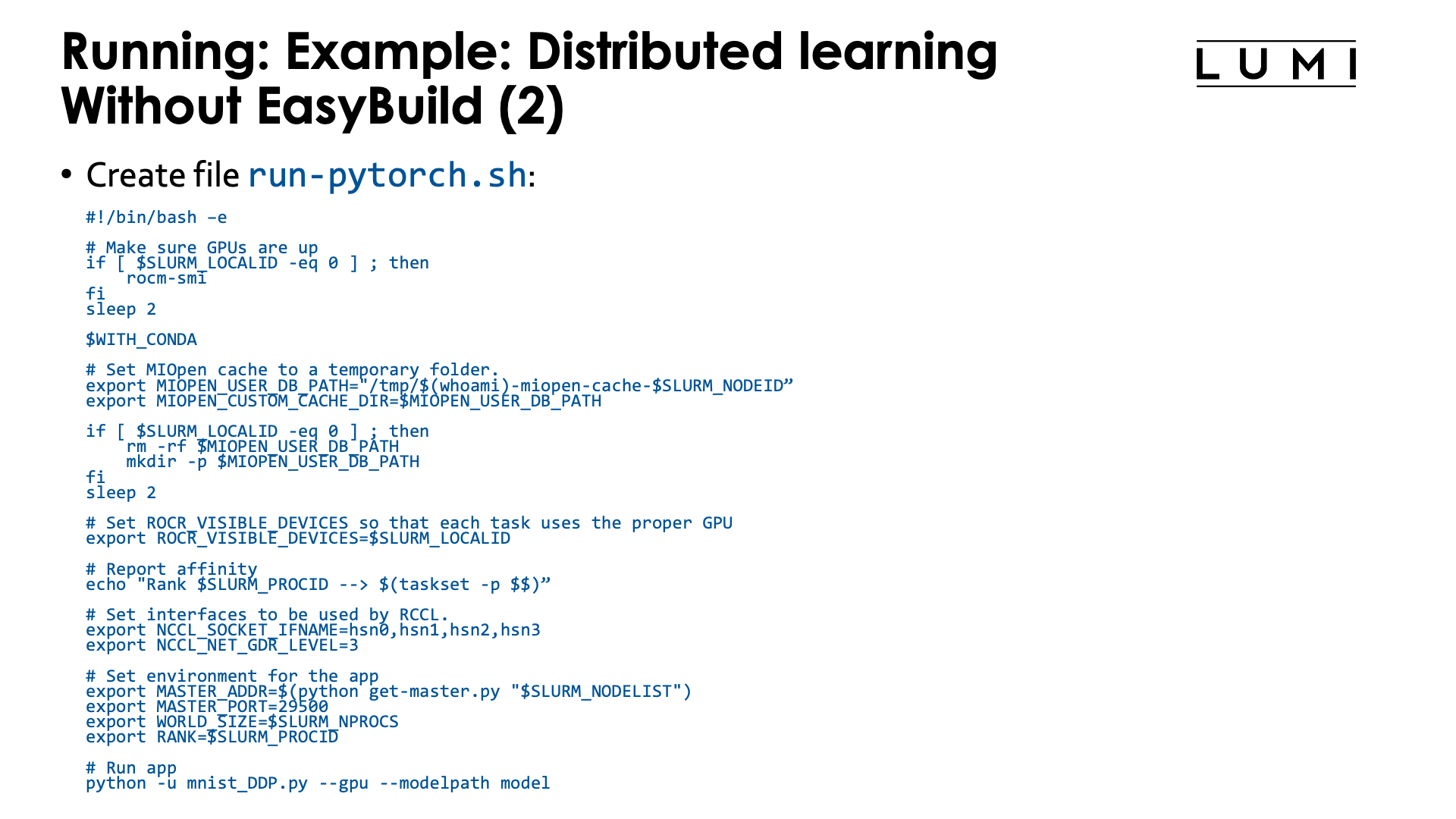
Second, we need a script that we will run in the container. Store the script as
run-pytorch.sh:
#!/bin/bash -e
# Make sure GPUs are up
if [ $SLURM_LOCALID -eq 0 ] ; then
rocm-smi
fi
sleep 2
# !Remove this if using an image extended with cotainr or a container from elsewhere.!
# Start conda environment inside the container
$WITH_CONDA
# MIOPEN needs some initialisation for the cache as the default location
# does not work on LUMI as Lustre does not provide the necessary features.
export MIOPEN_USER_DB_PATH="/tmp/$(whoami)-miopen-cache-$SLURM_NODEID"
export MIOPEN_CUSTOM_CACHE_DIR=$MIOPEN_USER_DB_PATH
if [ $SLURM_LOCALID -eq 0 ] ; then
rm -rf $MIOPEN_USER_DB_PATH
mkdir -p $MIOPEN_USER_DB_PATH
fi
sleep 2
# Optional! Set NCCL debug output to check correct use of aws-ofi-rccl (these are very verbose)
export NCCL_DEBUG=INFO
export NCCL_DEBUG_SUBSYS=INIT,COLL
# Set interfaces to be used by RCCL.
# This is needed as otherwise RCCL tries to use a network interface it has
# no access to on LUMI.
export NCCL_SOCKET_IFNAME=hsn0,hsn1,hsn2,hsn3
# Next line not needed anymore in ROCm 6.2. You may see PHB also instead of 3, which is equivalent
export NCCL_NET_GDR_LEVEL=3
# Set ROCR_VISIBLE_DEVICES so that each task uses the proper GPU
export ROCR_VISIBLE_DEVICES=$SLURM_LOCALID
# Report affinity to check
echo "Rank $SLURM_PROCID --> $(taskset -p $$); GPU $ROCR_VISIBLE_DEVICES"
# The usual PyTorch initialisations (also needed on NVIDIA)
# Note that since we fix the port ID it is not possible to run, e.g., two
# instances via this script using half a node each.
export MASTER_ADDR=$(python get-master.py "$SLURM_NODELIST")
export MASTER_PORT=29500
export WORLD_SIZE=$SLURM_NPROCS
export RANK=$SLURM_PROCID
# Run app
cd /workdir/mnist
python -u mnist_DDP.py --gpu --modelpath model
The script needs to be executable.
The script sets a number of environment variables. Some are fairly standard when using PyTorch on an HPC cluster while others are specific for the LUMI interconnect and architecture or the AMD ROCm environment. We notice a number of things:
-
At the start we just print some information about the GPU. We do this only ones on each node on the process which is why we test on
$SLURM_LOCALID, which is a numbering starting from 0 on each node of the job:if [ $SLURM_LOCALID -eq 0 ] ; then rocm-smi fi sleep 2 -
The container uses a Conda environment internally. So to make the right version of Python and its packages availabe, we need to activate the environment. The precise command to activate the environment is stored in
$WITH_CONDAand we can just call it by specifying the variable as a bash command. -
The
MIOPEN_environment variables are needed to make MIOpen create its caches on/tmpas doing this on Lustre fails because of file locking issues:export MIOPEN_USER_DB_PATH="/tmp/$(whoami)-miopen-cache-$SLURM_NODEID" export MIOPEN_CUSTOM_CACHE_DIR=$MIOPEN_USER_DB_PATH if [ $SLURM_LOCALID -eq 0 ] ; then rm -rf $MIOPEN_USER_DB_PATH mkdir -p $MIOPEN_USER_DB_PATH fiThese caches are used to store compiled kernels.
-
It is also essential to tell RCCL, the communication library, which network adapters to use. These environment variables start with
NCCL_because ROCm tries to keep things as similar as possible to NCCL in the NVIDIA ecosystem:export NCCL_SOCKET_IFNAME=hsn0,hsn1,hsn2,hsn3 export NCCL_NET_GDR_LEVEL=3Without this RCCL may try to use a network adapter meant for system management rather than inter-node communications!
-
We also set
ROCR_VISIBLE_DEVICESto ensure that each task uses the proper GPU. This is again based on the local task ID of each Slurm task. -
Furthermore some environment variables are needed by PyTorch itself that are also needed on NVIDIA systems.
PyTorch needs to find the master for communication which is done through the
get-master.pyscript that we created before:export MASTER_ADDR=$(python get-master.py "$SLURM_NODELIST") export MASTER_PORT=29500As we fix the port number here, the
conda-python-distributedscript that we provide, has to run on exclusive nodes. Running, e.g., 2 4-GPU jobs on the same node with this command will not work as there will be a conflict for the TCP port for communication on the master asMASTER_PORTis hard-coded in this version of the script.
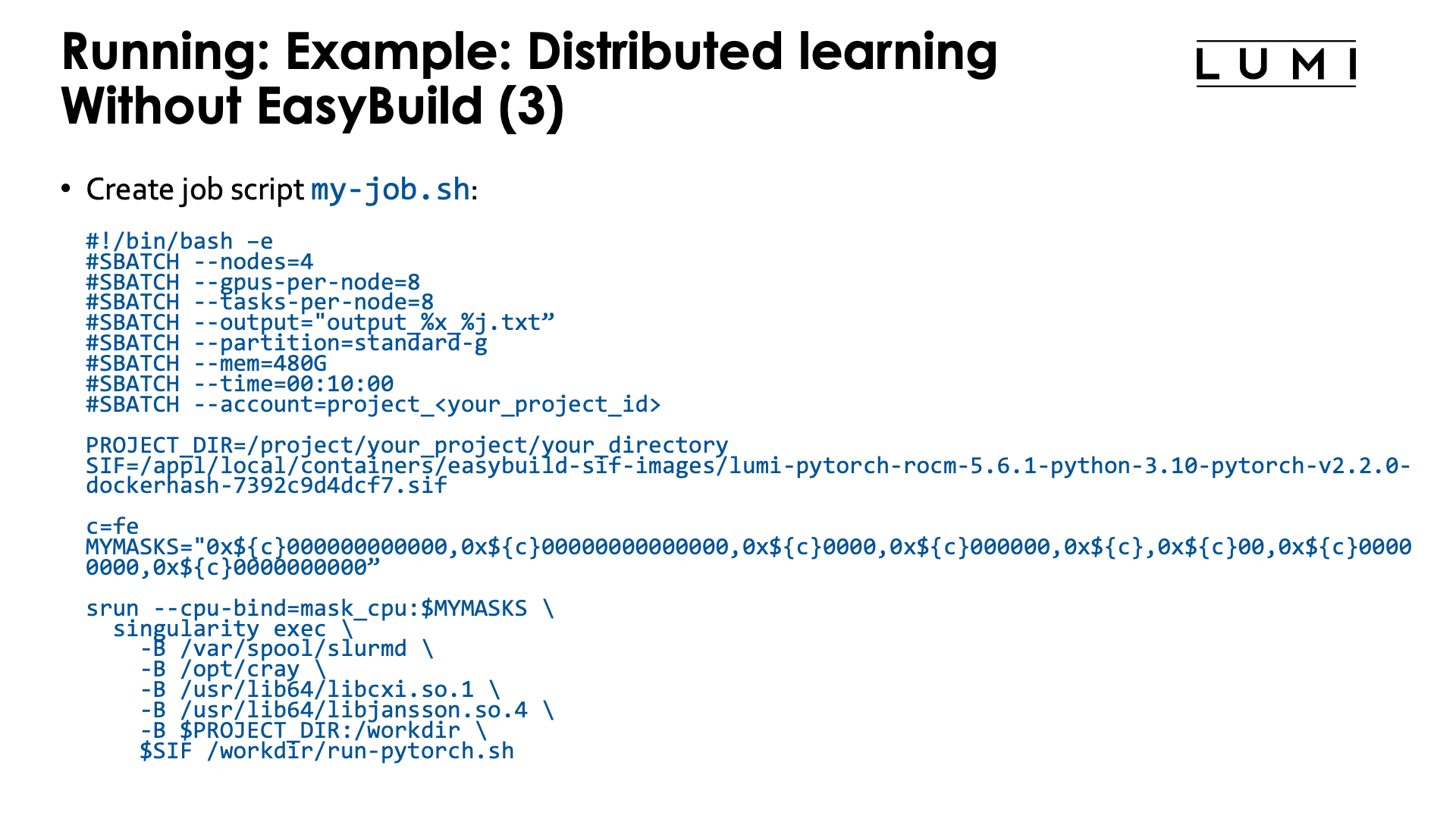
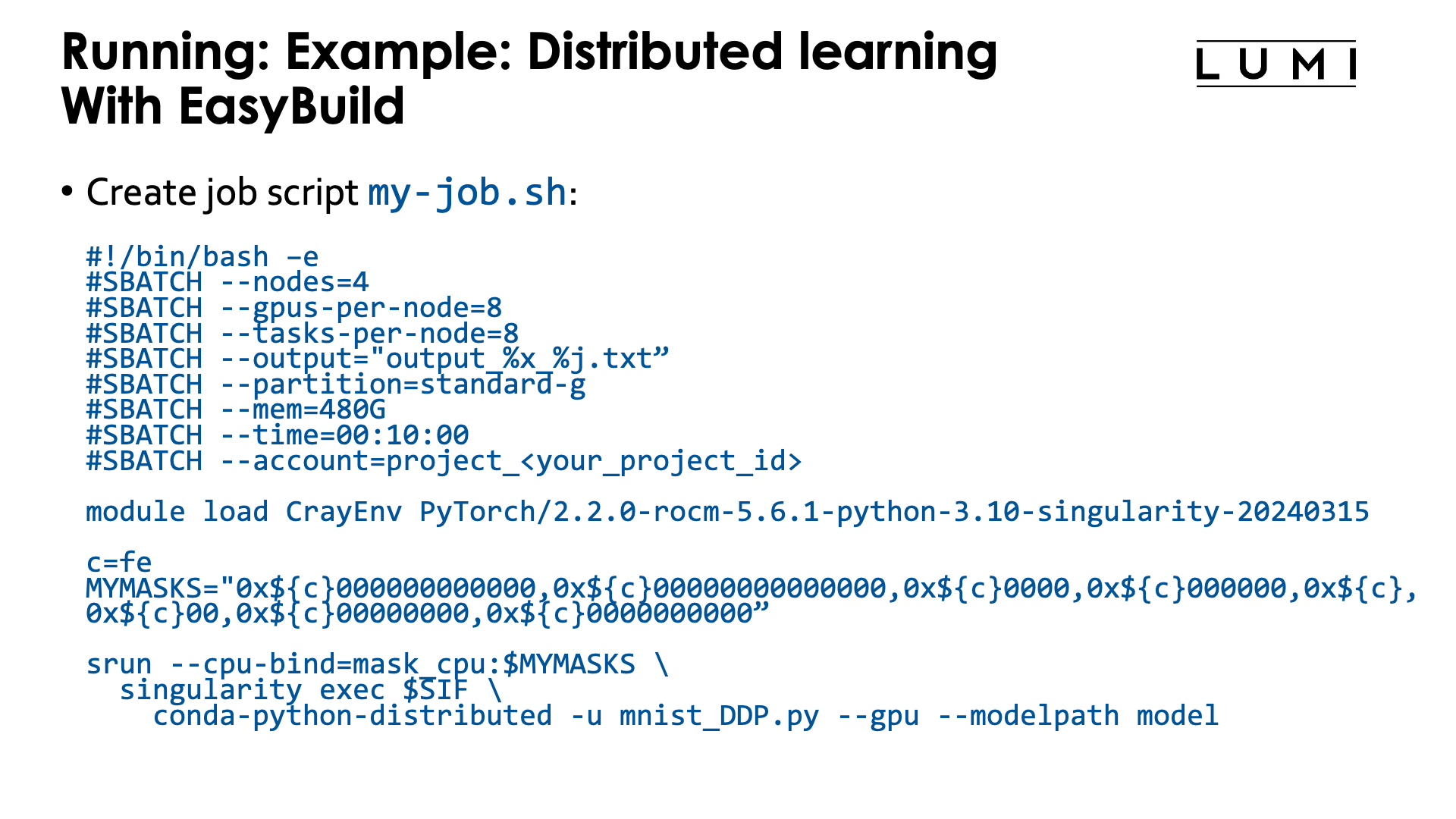
And finally you need a job script that you can then submit with sbatch. Lets call it my-job.sh:
#!/bin/bash -e
#SBATCH --nodes=4
#SBATCH --gpus-per-node=8
#SBATCH --tasks-per-node=8
#SBATCH --output="output_%x_%j.txt"
#SBATCH --partition=standard-g
#SBATCH --mem=480G
#SBATCH --time=00:10:00
#SBATCH --account=project_<your_project_id>
CONTAINER=your-container-image.sif
c=fe
MYMASKS="0x${c}000000000000,0x${c}00000000000000,0x${c}0000,0x${c}000000,0x${c},0x${c}00,0x${c}00000000,0x${c}0000000000"
srun --cpu-bind=mask_cpu:$MYMASKS \
singularity exec \
-B /var/spool/slurmd \
-B /opt/cray \
-B /usr/lib64/libcxi.so.1 \
-B /usr/lib64/libjansson.so.4 \
-B $PWD:/workdir \
$CONTAINER /workdir/run-pytorch.sh
The important parts here are:
-
We start PyTorch via
srunand this is recommended. Thetorchruncommand is not supported on LUMI, as is any other process starter that can be found in AI software that uses ssh to start processes on other nodes rather than going via the resource manager (with, e.g.,srun). -
We also use a particular CPU mapping so that each rank can use the corresponding GPU number (which is taken care of in the
run-pytorch.shscript). We use the "Linear assignment of GCD, then match the cores" strategy. -
Note the bindings. In this case we do not even bind the full
/project,/scratchand/flashsubdirectories, but simply make the current subdirectory that we are using outside the container available as/workdirin the container. This also implies that any non-relative symbolic link or any relative symbolic link that takes you out of the current directory and its subdirectories, will not work, which is awkward as you may want several libraries to run from to have simultaneous jobs, but, e.g., don't want to copy your dataset to each of those directories.
Example: Distributed learning with the EasyBuild-generated module¶
To really run this example, some additional program files and data files are needed that are not explained in this text. You can find more information on the PyTorch page in the LUMI Software Library.
It turns out that the first two above scripts in the example above, are fairly generic.
Therefore the module provides a slight variant of the second script, now called conda-python-distributed,
that at the end calls python, passing it all arguments it got and hence can be used to start other Python code also.
It is in $CONTAINERROOT/runscripts or in the container as /runscripts.
As the module also takes care of bindings, the job script is simplified to
#!/bin/bash -e
#SBATCH --nodes=4
#SBATCH --gpus-per-node=8
#SBATCH --tasks-per-node=8
#SBATCH --output="output_%x_%j.txt"
#SBATCH --partition=standard-g
#SBATCH --mem=480G
#SBATCH --time=00:10:00
#SBATCH --account=project_<your_project_id>
module load LUMI # Which version doesn't matter, it is only to get the container.
module load PyTorch/2.2.0-rocm-5.6.1-python-3.10-singularity-20240315
c=fe
MYMASKS="0x${c}000000000000,0x${c}00000000000000,0x${c}0000,0x${c}000000,0x${c},0x${c}00,0x${c}00000000,0x${c}0000000000"
cd mnist
srun --cpu-bind=mask_cpu:$MYMASKS \
singularity exec $SIFPYTORCH \
conda-python-distributed -u mnist_DDP.py --gpu --modelpath model
So basically you only need to take care of the proper CPU bindings where we again use the "Linear assignment of GCD, then match the cores" strategy.
Extending the containers¶
We can never provide all software that is needed for every user in our containers. But there are several mechanisms that can be used to extend the containers that we provide:
Extending the container with cotainr¶
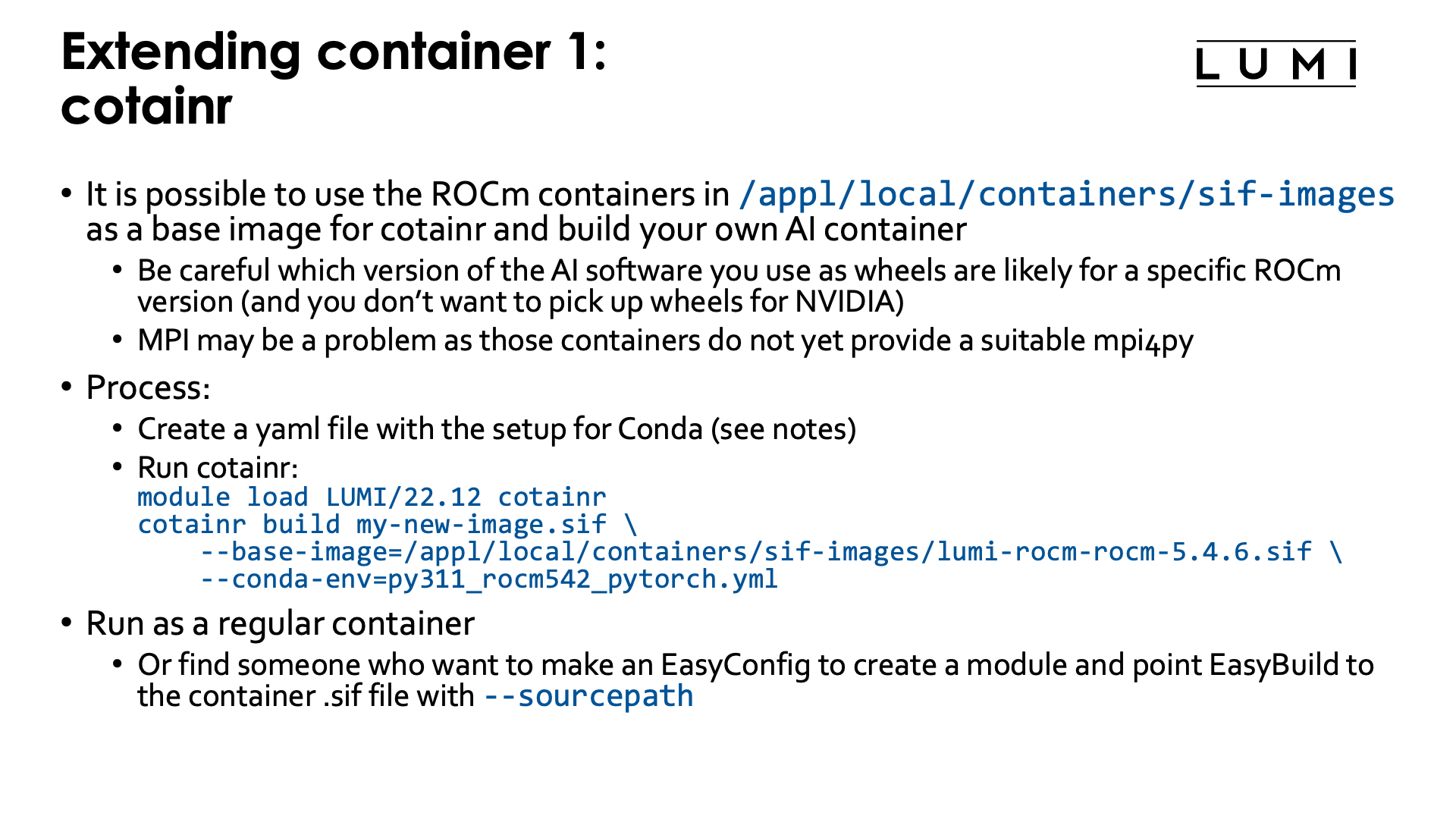
The LUMI Software Library offers some container images for ROCmTM. Though these images can be used simply to experiment with different versions of ROCm, an important use of those images is as base images for the cotainr tool that supports Conda to install software in the container.
Some care is needed though when you want to build your own AI containers. You need to ensure that binaries for AMD GPUs are used,
as by default you may get served NVIDIA-only binaries. MPI can also be a problem, as the base image does not yet provide,
e.g., a properly configures mpi4py (which would likely be installed in a way that conflicts with cotainr).
The container images that we provide can be found in the following directories on LUMI:
-
/appl/local/containers/sif-images: Symbolic link to the latest version of the container for each ROCm version provided. Those links can change without notice! -
/appl/local/containers/tested-containers: Tested containers provided as a Singularity .sif file and a docker-generated tarball. Containers in this directory are removed quickly when a new version becomes available. -
/appl/local/containers/easybuild-sif-images: Singularity .sif images used with the EasyConfigs that we provide. They tend to be available for a longer time than in the other two subdirectories.
First you need to create a yaml file to tell Conda which is called by cotainr which packages need to be installed.
This is also discussed in
"Using the images as base image for cotainr" section of the LUMI Software Library rocm page.
For example, to create a PyTorch installation for ROCm 6.0.3, one can first create the
YAML file py312_rocm603_pytorch.yml with content
name: py312_rocm603_pytorch.yml
channels:
- conda-forge
dependencies:
- filelock=3.15.4
- fsspec=2024.9.0
- jinja2=3.1.4
- markupsafe=2.1.5
- mpmath=1.3.0
- networkx=3.3
- numpy=2.1.1
- pillow=10.4.0
- pip=24.0
- python=3.12.3
- sympy=1.13.2
- typing-extensions=4.12.2
- pip:
- --extra-index-url https://download.pytorch.org/whl/rocm6.0/
- pytorch-triton-rocm==3.0.0
- torch==2.4.1+rocm6.0
- torchaudio==2.4.1+rocm6.0
- torchvision==0.19.1+rocm6.0
Next we need to run cotainr with the right base image to generate the container:
module load LUMI/24.03 cotainr
cotainr build my-new-image.sif \
--base-image=/appl/local/containers/sif-images/lumi-rocm-rocm-6.0.3.sif \
--conda-env=py312_rocm603_pytorch.yml
or, as for the current version of cotainr in LUMI/24.03 this image is actually the base image for the lumi-g preset:
module load LUMI/24.03 cotainr
cotainr build my-new-image.sif \
--system=lumi-g \
--conda-env=py312_rocm603_pytorch.yml
The cotainr command takes three arguments in this example:
-
my-new-image.sifis the name of the container image that it will generate. -
--base-image=/appl/local/containers/sif-images/lumi-rocm-rocm-6.0.3.sifpoints to the base image that we will use, in this case the latest version of the ROCm 6.0.3 container provided on LUMI.This version was chosen for this case as ROCm 6.0.3 version corresponding to the driver on LUMI at the time of writing (early December 2024), but with that driver we could also have chosen PyTorch versions that require ROCm 6.1 or 6.2.
-
--conda-env=py312_rocm603_pytorch.yml: The YAML file with the environment definition.
The result is a container for which you will still need to provide the proper bindings to some libraries on the system (to interface
properly with Slurm and so that RCCL with the OFI plugin can work) and to your spaces in the file system that you want to use.
Or you can adapt an EasyBuild-generated module for the ROCm container that you used to use your container instead (which will require
the EasyBuild eb command flag --sourcepath to specify where it can find the container that you generated, and you cannot delete
it from the installation afterwards). In the future, we may provide some other installable module(s) with generic bindings to use
instead.
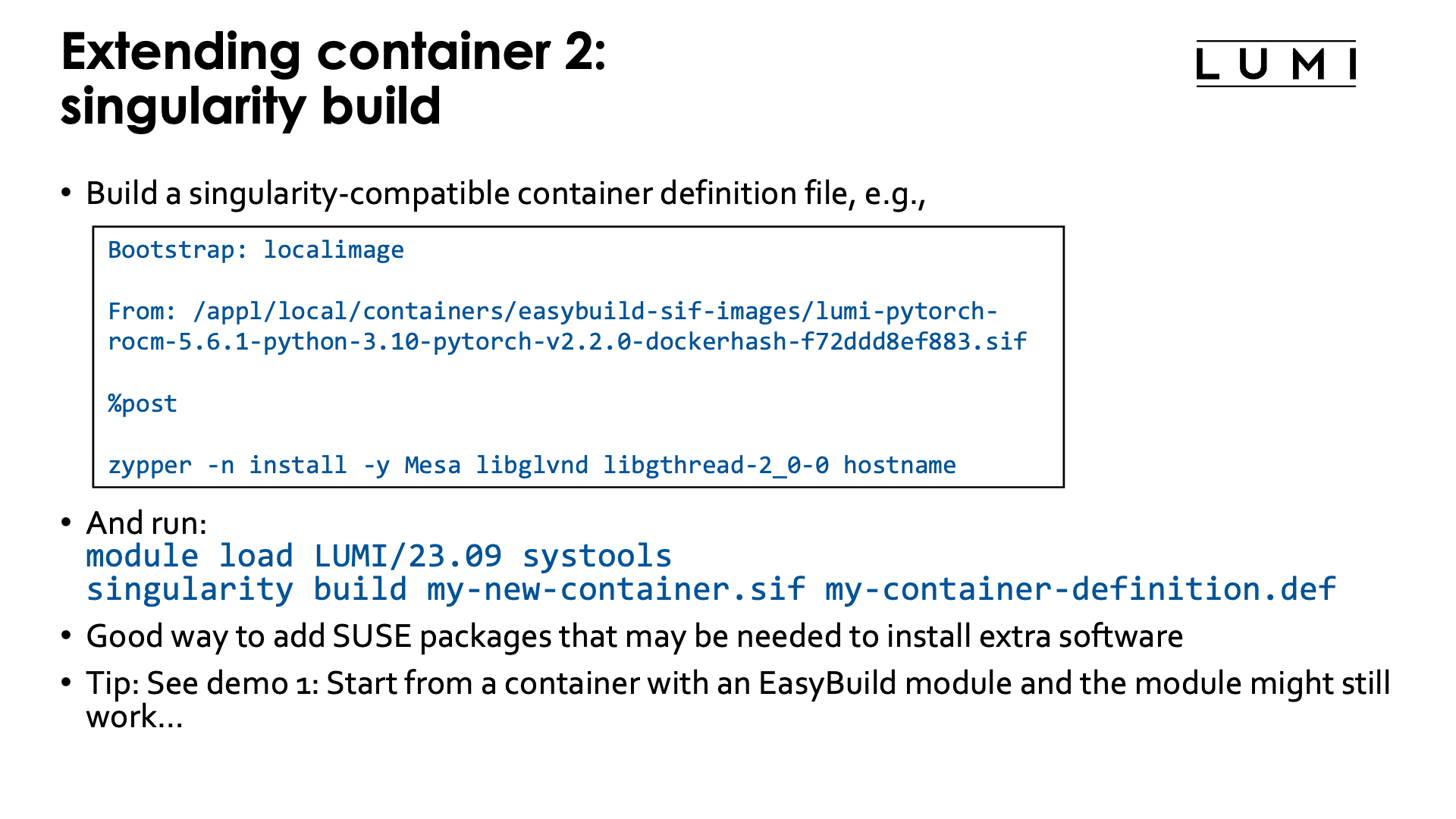
Extending the container with the singularity unprivileged proot build¶
Singularity specialists can also build upon an existing container using singularity build.
The options for build processes are limited though because we have no support for user namespaces or the fakeroot feature.
The "Unprivileged proot builds" feature from recent SingularityCE versions
is supported though.
To use this feature, you first need to write a singularity-compatible container definition file, e.g.,
Bootstrap: localimage
From: /appl/local/containers/easybuild-sif-images/lumi-pytorch-rocm-5.6.1-python-3.10-pytorch-v2.2.0-dockerhash-f72ddd8ef883.sif
%post
zypper -n install -y Mesa libglvnd libgthread-2_0-0 hostname
which is a definition file that will use the SUSE zypper software installation tool to add a number of packages
to one of the LUMI PyTorch containers to provide support for software OpenGL rendering (the CDNA GPUs do not support
OpenGL acceleration) and the hostname command.
To use the singularity build command, we first need to make the proot command available. This is currently
not installed in the LUMI system image, but is provided by the systools/24.03 and later modules that can be
found in the corresponding LUMI stack and in the CrayEnv environment.
To update the container, run:
module load LUMI/24.03 systools
singularity build my-new-container.sif my-container-definition.def
Note:
-
In this example, as we use the
LUMI/24.03module, there is no need to specify the version ofsystoolsas there is only one in this stack. An alternative would have been to usemodule load CrayEnv systools/24.03 -
The
singularity buildcommand takes two options: The first one is the name of the new container image that it generates and the second one is the container definition file.
When starting from a base image installed with one of our EasyBuild recipes, it is possible to overwrite the image file and in fact, the module that was generated with EasyBuild might just work...
Extending the container through a Python virtual environment¶
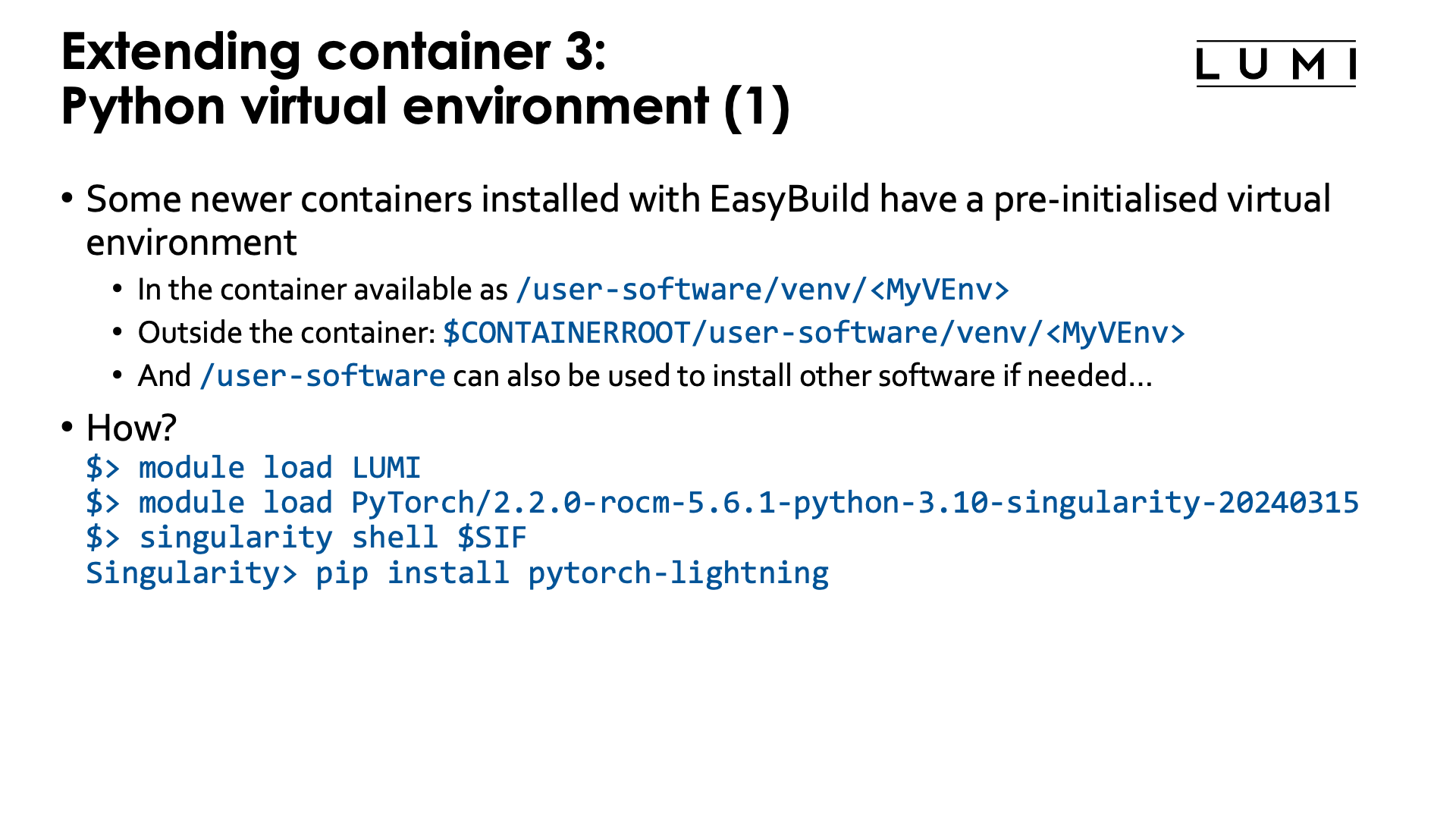
Some newer containers installed with EasyBuild already include a pre-initialised virtual environment
(created with venv). The location in the filesystem of that virtual environment is:
-
/user-software/venv/MyVEnvin the container, whereMyVEnvis actually different in different containers. We used the same name as for the Conda environment. -
$CONTAINERROOT/user-software/venv/MyVEnvoutside the container (unless that directory structure is replaced with the$CONTAINERROOT/user-software.squashfsfile).
That directory struture was chosen to (a) make it possible to install a second virtual environment in /user-software/venv while
(b) also leaving space to install software by hand in /user-software and hence create a bin and lib subdirectory in those
(though they currently are not automatically added to the search paths for executables and shared libraries in the container).
The whole process is very simple with those containers that already have a pre-initialised virtual environment as the module already intialises several environment variables in the container that have the combined effect of activating both the Conda installation and then on top of it, the default Python virtual environment.
Outside the container, we need to load the container module, and then we can easily go into the container using the SIF
environment variable to point to its name:
module load LUMI
module load PyTorch/2.2.0-rocm-5.6.1-python-3.10-singularity-20240315
singularity shell $SIF
and in the container, at the Singularity> prompt, we can use pip install without extra options, e.g.,
pip install pytorch-lightning
As already discussed before in this session of the tutorial, such a Python virtual environment has the potential
to create a lot of small files in the Lustre $CONTAINERROOT/user-software subdirectory, which can wipe out
all benefits we got from using a container for the Python installation. But our modules with virtual environment
support offer a solution for this also: the make-squashfs command (which should be run outside the container)
will convert the user-software subdirectory in $CONTAINERROOT into the SquashFS file user-software.squashfs
which, after reloading the module, will be used to provide the /user-software subdirectory in the container.
The downside is that now /user-software is read-only as it comes from the SquashFS file. To install further
packages, you'd have to remove the user-software.squashfs file again and reload the container module.
Currently the make-squashfs file will not remove the $CONTAINERROOT/user-software subdirectory, but once
you have verified that the SquashFS file is OK and useable in the container, you can safely delete it yourself.
We also provide the unmake-squasfs script to re-generate the $CONTAINERROOT/user-software subdirectory
(though attribues such as file time, etc., will not be the same as before).
It is of course possible to use this technique with all Python containers, but you may have to do a lot more steps by hand, such as adding the binding for a directory for the virtual environment, creating and activating the environment, and replacing the directory with a SquashFS file to improve file system performance.
Conclusion: Container limitations on LUMI¶
To conclude the information on using singularity containers on LUMI, we want to repeat the limitations:
-
Containers use the host's operating system kernel which is likely different and may have different drivers and kernel extensions than your regular system. This may cause the container to fail or run with poor performance. Also, containers do not abstract the hardware unlike some virtual machine solutions.
-
The LUMI hardware is almost certainly different from that of the systems on which you may have used the container before and that may also cause problems.
In particular a generic container may not offer sufficiently good support for the Slingshot 11 interconnect on LUMI which requires OFI (libfabric) with the right network provider (the so-called Cassini provider) for optimal performance. The software in the container may fall back to TCP sockets resulting in poor performance and scalability for communication-heavy programs.
For containers with an MPI implementation that follows the MPICH ABI the solution is often to tell it to use the Cray MPICH libraries from the system instead.
Likewise, for containers for distributed AI, one may need to inject an appropriate RCCL plugin to fully use the Slingshot 11 interconnect.
-
As containers rely on drivers in the kernel of the host OS, the AMD driver may also cause problems. AMD only guarantees compatibility of the driver with two minor versions before and after the ROCm release for which the driver was meant. Hence containers using a very old version of ROCm or a very new version compared to what is available on LUMI, may not always work as expected.
-
The support for building containers on LUMI is currently limited due to security concerns. Any build process that requires elevated privileges, fakeroot or user namespaces will not work.